Canadian Helicopters Offshore
Sikorsky S-92A (hélicoptère), C-GICB
Halifax (Nouvelle-Écosse), 155 NM ESE
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu.
Résumé
Le 24 juillet 2019, à 11 h 54 (heure avancée de l’Atlantique), un hélicoptère Sikorsky S-92A (immatriculation C-GICB, numéro de série 920121) exploité par Canadian Helicopters Offshore (CHO) a décollé de l’aéroport international Stanfield d’Halifax (Nouvelle-Écosse) pour un vol aux instruments à destination de l’installation centrale Thebaud, à environ 155 milles marins à l’est-sud-est. Deux pilotes et 11 passagers se trouvaient à bord.
Deux approches aux instruments ont été tentées vers la plateforme, mais elles ont toutes deux échoué en raison de nuages à basse altitude et d’une mauvaise visibilité. Au cours de la 2e approche interrompue, l’équipage de conduite a établi un contact visuel avec la plateforme et choisi d’effectuer une approche à vue. Peu après le début de l’approche à vue, un état de descente à taux élevé et de faible vitesse anémométrique s’est déclaré, dans des conditions de faible visibilité. Au cours de la descente, les moteurs de l’hélicoptère ont été poussés jusqu’à un surcouple maximal de 146 %. L’équipage a repris la maîtrise de l’aéronef et arrêté la descente à environ 13 pieds au-dessus de la surface de l’eau.
Au cours du départ subséquent par pilotage manuel, une 2e descente inopinée s’est produite, mais la situation a été rectifiée rapidement. L’aéronef est ensuite retourné à l’aéroport international Stanfield d’Halifax sans autre incident. L’étendue des dommages causés à l’hélicoptère est inconnue, puisque l’hélicoptère a été retiré du service. Il n’y a pas eu de blessés.
L’enquête a permis de déterminer que pendant l’approche finale à vue, l’hélicoptère est entré dans un état de faible énergie : il volait à faible vitesse anémométrique, avec un taux de descente élevé, une assiette en cabré et un réglage de faible puissance. L’état de faible énergie de l’hélicoptère n’a pas été détecté par l’équipage de conduite, dont l’attention était portée vers l’héliplateforme, qui surplombait le brouillard dans une zone sans horizon perceptible. L’environnement visuel dégradé (DVE) a fait en sorte qu’il était difficile pour les pilotes de déceler l’état d’approche instable de l’aéronef.
Fait contribuant aux difficultés, les procédures d’utilisation normalisées (SOP) de CHO ne faisaient aucune référence à l’état énergétique dans ses critères d’approche stabilisée, ce qui augmentait le risque qu’un état de faible énergie survienne et ne soit pas détecté. De plus, CHO n’avait pas adopté la pratique recommandée d’exiger des équipages qu’ils vérifient et confirment verbalement que l’approche était stable à des points cibles (qu’on appelle couramment en anglais des « gates ») au cours d’une approche finale. Par conséquent, les directives données aux équipages de conduite dans les SOP étaient insuffisantes pour garantir que les approches étaient menées conformément aux lignes directrices d’approche stabilisée recommandées dans l’industrie.
Par ailleurs, l’enquête a permis de déterminer qu’au cours de l’approche finale dans un DVE, le pilote aux commandes a enfoncé le bouton de débrayage du compensateur cyclique et l’a tenu enfoncé. Comme cela a été constaté dans des événements antérieurs, cette technique réduit l’efficacité globale du système de commandes automatiques de vol (AFCS). Dans l’événement à l’étude, l’hélicoptère a atteint une assiette en cabré de 17°, avec un taux de descente excessif et un glissement accentué vers la gauche au cours de l’approche finale. Le fait d’effectuer une approche à vue dans un DVE en tenant enfoncé le bouton de débrayage du compensateur cyclique a augmenté la charge de travail du pilote et contribué à des difficultés de contrôle qui ont entraîné une approche instable. Alors que l’hélicoptère descendait sous l’altitude radar de 250 pieds, il était en descente prononcée de 800 pi/min, à très basse vitesse anémométrique et les moteurs produisaient de la puissance. Lorsque le pilote aux commandes a instinctivement augmenté le collectif, le taux de descente de l’hélicoptère a augmenté rapidement jusqu’à 1800 pi/min. Le fait d’augmenter la puissance alors que l’hélicoptère se trouvait en descente prononcée à basse vitesse anémométrique et à taux de descente élevé a entraîné son entrée dans un anneau tourbillonnaire. (état de vortex).
Ni le manuel de vol du fabricant ni les SOP de l’exploitant ne mettaient en garde contre les dangers possibles associés à l’utilisation du bouton de débrayage du compensateur dans des conditions telles qu’un DVE.
Si les manuels de vol des fabricants et les SOP des exploitants ne contiennent pas de lignes directrices pour l’utilisation du bouton de débrayage du compensateur cyclique, il pourrait en résulter des problèmes de contrôle de l’aéronef dans un DVE, en raison de l’utilisation sous-optimale de l’AFCS.
L’hélicoptère est entré en descente inopinée à taux très élevé et à basse vitesse anémométrique dans le banc de brouillard, avec le train d’atterrissage sorti. Pourtant, le système d’avertissement de proximité du sol amélioré (EGPWS) de l’hélicoptère n’a pas alerté l’équipage à propos de la situation. Cela découle d’une lacune, déjà cernée par le Bureau de la sécurité des transports du Canada (BST), dans la couverture assurée par l’EGPWS du S-92. Si une descente inopinée se produit avec le train d’atterrissage sorti et une vitesse anémométrique inférieure à 50 nœuds, l’EGPWS n’émet aucun avertissement de risque d’impact sans perte de contrôle.
En 2016, le BST a émis une recommandation prônant l’installation de systèmes d’avertissement et d’alarme d’impact à bord d’hélicoptères commerciaux qui effectuent des vols la nuit ou dans des conditions météorologiques de vol aux instruments. Au moment de la rédaction du présent rapport, la réglementation ne contient toujours pas une telle exigence. Par conséquent, les fabricants et les exploitants d’hélicoptères sont libres de désactiver des modes d’EGPWS, comme c’était le cas à bord du S-92A. Tant que les EGPWS et les systèmes d’avertissement et d’alarme d’impact pour hélicoptères ne sont pas obligatoires à bord des hélicoptères commerciaux canadiens qui volent de nuit ou dans des conditions météorologiques de vol aux instruments, l’équipage de conduite et les passagers à bord de ces vols courent un risque accru d’impact sans perte de contrôle.
1.0 Renseignements de base
1.1 Déroulement du vol
1.1.1 Départ
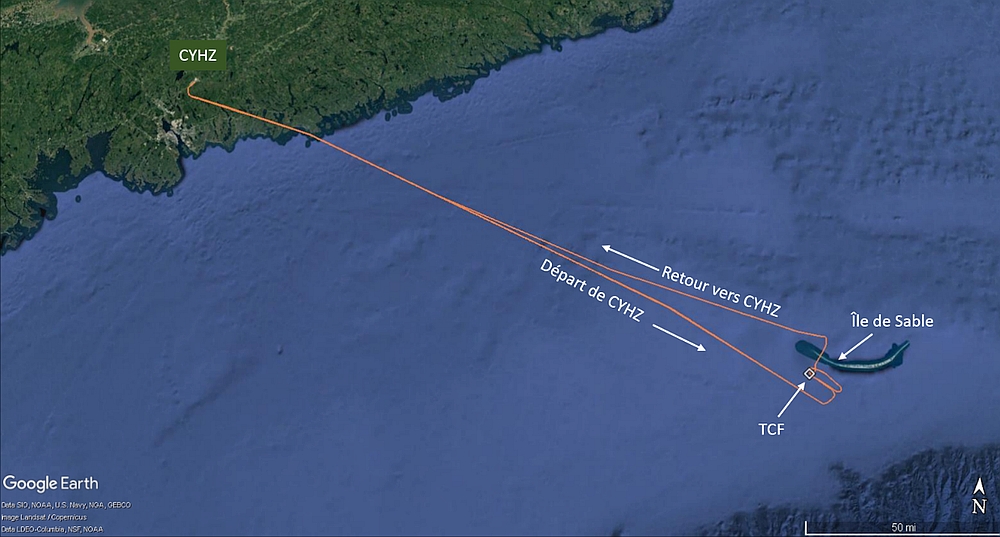
Le 24 juillet 2019, vers 5 h 45Note de bas de page 1, les pilotes dans l’événement à l’étude sont arrivés au hangar de Canadian Helicopters Offshore (CHO) à l’aéroport international Stanfield d’Halifax (CYHZ) (Nouvelle-Écosse). Les pilotes devaient partir à 7 h pour un vol aller-retour de transport de passagers vers l’installation centrale Thebaud (TCF)Note de bas de page 2, à environ 155 milles marins (NM) à l’est-sud-est de CYHZ (figure 1). Le vol devait à l’origine avoir lieu le 22 juillet, mais il avait été reporté en raison de nuages à basse altitude et de faible visibilité à la TCFNote de bas de page 3. Vers 6 h 30 le jour de l’événement, le répartiteur de CHO a informé les pilotes et les passagers que le vol avait été repoussé jusqu’à nouvel ordre en raison des nuages à basse altitude et de la faible visibilité à la TCF.
Vers 11 h 30, le répartiteur de CHO a avisé les pilotes que les conditions météorologiques au large s’étaient suffisamment améliorées pour tenter d’effectuer le vol. À 11 h 54, l’hélicoptère a quitté CYHZ selon un plan de vol aux instruments (IFR), avec à son bord 2 pilotes et 11 passagers. L’hélicoptère s’est dirigé vers la TCF à une altitude de 7000 pieds au-dessus du niveau de la mer (ASL).
Vers 12 h 40, l’observateur météorologique de la TCF a informé les pilotes que les vents soufflaient d’environ 300° vrais (V) Note de bas de page 4 à 8 nœuds, que la visibilité était de 1 mille terrestre (SM) et qu’il y avait un plafond couvert à 300 pieds au-dessus du sol (AGL); cependant, la couche nuageuse et la visibilité fluctuaient rapidement.
1.1.2 Deux premières approches vers l’installation centrale Thebaud
Une fois que l’aéronef était à moins de 10 NM de la TCF, les pilotes ont effectué la vérification préalable à l’atterrissage, ils ont effectué une descente sur 3 axesNote de bas de page 5 jusqu’à 800 pieds ASL et ils ont positionné l’hélicoptère pour une procédure d’approche extracôtière / au radar de bord (procédure Offshore/ARA)Note de bas de page 6 approuvée par Transports Canada (TC), avec une trajectoire de rapprochement dans le vent à 320° magnétiques (M). Cette procédure a été suivie en raison des nuages bas et de la faible visibilité.
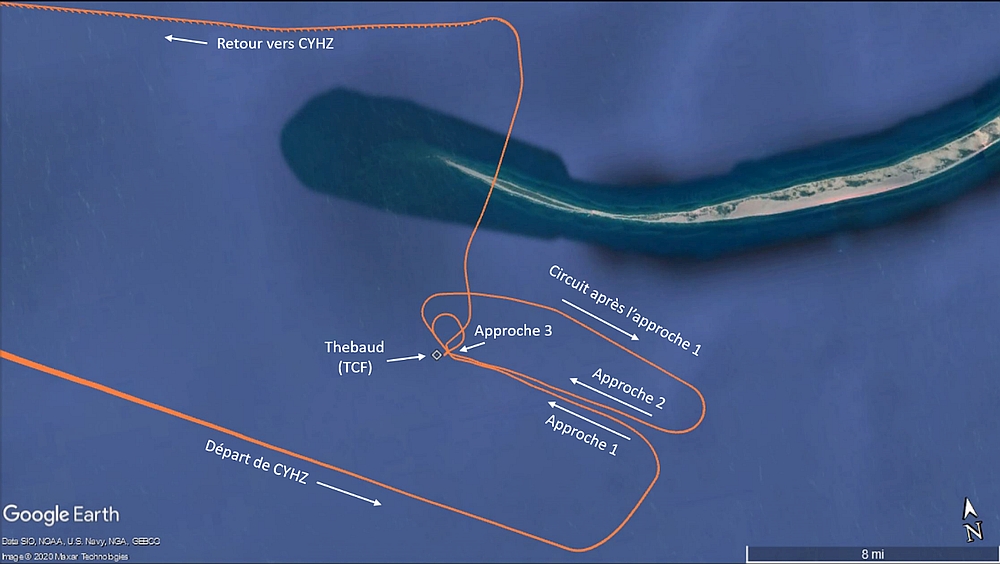
L’équipage a tenté l’approche deux fois, mais aucune tentative n’a été réussie parce que l’équipage n’avait pas acquis les références visuelles nécessaires pour poursuivre l’approche jusqu’à l’atterrissage (figure 2)Note de bas de page 7. Pour ces 2 approches, le commandant de bord (qui occupait le siège de droite) était le pilote aux commandes (PF) et le premier officier (qui occupait le siège de gauche) était le pilote surveillant (PM). Les approches finales ont commencé respectivement à 5,6 NM et à 6,7 NM de la TCF, en palier à une altitude radar (RADALT)Note de bas de page 8 de 800 pieds, au-dessus d’une couche nuageuse, et à une vitesse anémométrique de 100 nœuds (KIAS)Note de bas de page 9. Lors des approches finales, aucune correction de dérive n’a été nécessaire pour maintenir la trajectoire de rapprochement souhaitée jusqu’à la plateforme, et la vitesse anémométrique et la vitesse sol étaient à peu près les mêmes. Au cours des 2 approches finales, l’hélicoptère a pénétré dans les nuages entre 500 pieds et 700 pieds RADALT.
Au cours des 2 approches, les pilotes ont amorcé une approche interrompue conformément aux procédures d’utilisation normalisées (SOP) de CHO, parce que les repères visuels étaient insuffisants pour l’atterrissage, à environ 0,5 NM de la TCF, à 225 pieds RADALT et à 55 KIAS. Afin d’éviter la superstructure de la plateforme, les approches interrompues consistaient en un virage ascendant vers la droite, à un angle d’environ 30°, s’éloignant de la TCF. L’étape vent arrière du circuit entre la première et la deuxième procédure Offshore/ARA a été effectuée à 800 pieds au-dessus de la surface de l’eau, au-dessus de la couche nuageuse, avec maintien du cap (direction sud-est), de la vitesse anémométrique et de l’altitude RADALTNote de bas de page 10, à environ 2,0 NM au nord-est de la trajectoire de rapprochement. Les pilotes avaient décidé de regagner CYHZ si la seconde approche aux instruments échouait.
1.1.3 Troisième approche vers l’installation centrale Thebaud
Environ 15 secondes après avoir amorcé la deuxième approche interrompue, à environ 300 pieds RADALT, l’hélicoptère est sorti du nuage sur le plan horizontal. Le PM a informé le PF que l’héliplateforme, qui se trouve à 174 pieds au-dessus de l’eau, était visible au-dessus de la couche de brouillard déchiquetée sous l’hélicoptèreNote de bas de page 11. Même si la TCF était en vue, l’horizon n’était pas visible. Alors que l’hélicoptère s’éloignait en prenant de l’altitude, le PF a regardé à travers le poste de pilotage et a vu, lui aussi, l’héliplateforme au-dessus de la couche de brouillard.
Les pilotes ont déterminé qu’ils avaient suffisamment de carburant pour tenter une troisième approche (à vue)Note de bas de page 12. À ce moment-là, les pilotes ont effectué une mise en palier (maintien de l’altitude RADALT à 500 pieds) et ont amorcé un virage vers la droite, en utilisant le mode de pilotage automatique de maintien de cap, pour évaluer la possibilité d’effectuer une approche à vue. Pendant que l’aéronef virait, la vitesse anémométrique, qui était couplée à 80 KIAS dans la montée à 500 pieds RADALT, a été réduite à 66 KIAS.
À 13 h 32 min 15 s, à environ 1,1 NM de la TCF, l’hélicoptère est sorti de son virage sur un cap de 182°M et l’équipage a planifié une troisième approche. Il y avait une couche de brouillard déchiqueté sous l’hélicoptère et une couche de nuages allant d’épars à fragmentés au moins plusieurs centaines de pieds au-dessus de l’hélicoptère. Les pilotes pouvaient voir l’eau à travers le brouillard, directement sous l’hélicoptère. Étant donné que les vents étaient légers (c.-à-d. qu’ils ne s’inscrivaient pas sur les écrans principaux de vol [PFD]Note de bas de page 13), les pilotes ont décidé et se sont entendus qu’ils allaient virer à droite pour sortir du virage sur une trajectoire de rapprochement à environ 240° M, plutôt que de continuer à maintenir l’arc, jusqu’à atteindre la trajectoire de rapprochement initiale à 320° M comme prévu à l’origine. Puisque les pilotes prévoyaient effectuer l’approche finale en décalage à droite de la TCF, cette option était considérée comme étant plus expéditive et devant fournir de meilleures références pour le premier officier (qui exécuterait la manœuvre la manœuvre d’approche), puisqu’elle placerait la TCF du côté gauche de l’hélicoptère pendant les dernières étapes de l’approche de l’héliplateforme (la figure 3 présente l’orientation approximative avant le virage d’approche finale). Les pilotes ont décidé de rester à 500 pieds RADALT.
Environ 8 secondes après être sorti de virage sur le cap du 182° M, à 1 NM de la TCF, l’hélicoptère a entamé un virage vers la droite pour l’approche finale. Au cours du virage, le commandant de bord a informé le premier officier qu’il serait prêt à passer en vol aux instruments en cas d’épaississement du brouillard et au cas où le premier officier perdrait les références visuelles avec l’héliplateforme.

À 13 h 32 min 55 s, alors que l’hélicoptère se trouvait à 0,6 NM de la TCF, il est sorti de virage en approche finale, sur un cap de 271°M. L’hélicoptère était en palier avec un couple moteur de 46 % et était couplé à l’altitude RADALT de 500 pieds et à la vitesse de 61 KIAS. La vitesse anémométrique et la vitesse sol étaient sensiblement les mêmes.
Le premier officier a rangé sa carte d’approche et s’est préparé à prendre les commandes. Comme le premier officier était assis sur le siège de gauche, il n’a pas eu de contact visuel avec la TCF avant que l’hélicoptère sorte du virage en approche finale. Lorsque l’hélicoptère est sorti du virage, le commandant de bord a transféré les commandes au premier officier (qui était maintenant le PF). L’hélicoptère volait toujours au-dessus de la couche de brouillard, et le champ visuel des 2 pilotes vers l’héliplateforme était dégagé. La visibilité en vol estimée était d’environ 3 SM dans la direction de la TCF; cependant, l’horizon n’était pas visible derrière la TCF.
À 13 h 33 min 2 s, alors que l’hélicoptère se trouvait à 0,5 NM de la TCF, le commandant de bord (qui était maintenant le PM) a désactivé le mode de maintien de la vitesse anémométrique, puis le mode de maintien du cap, à la demande du PF.
À 13 h 33 min 4 s, le PF a enfoncé le bouton de désactivation du pilote automatique du cyclique pour désactiver le maintien de l’altitude RADALT, puis il a enfoncé et tenu enfoncé le bouton de débrayage du compensateur cyclique pour piloter manuellement l’approche. En même temps, le PF a abaissé le collectif (diminution du couple moteur qui est passé d’environ 45 % à 27 %), en utilisant la gâchette de débrayage du compensateur collectif, pour amorcer la descente. La descente a commencé alors que l’hélicoptère se trouvait à 0,43 NM de la TCF, à un angle d’approche de 7,1° par rapport à l’héliplateforme. Le PM était conscient que l’approche était effectuée à un d’angle d’approche plus prononcé que la norme de 4,7° de la compagnie, mais il ne s’en est pas inquiété parce que certains pilotes de la compagnie préféraient adopter un profil d’approche à vue avec un angle plus prononcéNote de bas de page 15. Le PF a demandé au PM quelle était la vitesse sol de l’hélicoptère, et le PM a répondu qu’elle était d’environ 60 nœuds.
À 13 h 33 min 6 s, alors que l’hélicoptère se trouvait à 0,4 NM de la TCF, son taux de descente était de 500 pieds par minute (pi/min) et il augmentait. Afin de réduire la vitesse vers l’avant de l’hélicoptère, le PF a déplacé le cyclique vers l’arrière, ce qui a entraîné une augmentation de l’assiette en cabré de l’hélicoptère à 12°. Le PM a informé le PF que la vitesse sol était d’environ 40 nœuds, ce qu’il considérait comme une vitesse légèrement élevée étant donné les vents légers et la proximité de l’hélicoptère avec la TCF. Le PF n’a pas accusé réception de cette indication. Au même moment, le cyclique a été déplacé à gauche et la pédale de droite a été enfoncée, progressivement, ce qui a engendré une dérive latérale vers la gauche (c.-à-d. vers le sud) par rapport à la trajectoire prévue et un lacet à droite, ce qui maintenait le nez de l’hélicoptère orienté en direction de l’héliplateforme (l’hélicoptère faisant une glissade vers la gauche).
À 13 h 33 min 14 s, alors que l’hélicoptère se trouvait à 0,3 NM de la TCF, à 415 pieds RADALT, son assiette en cabré a augmenté à 15°. Deux secondes plus tard, l’assiette en cabré a augmenté jusqu’à presque 17°, et l’hélicoptère s’est brièvement incliné de 6° vers la droite. Pendant ce temps, l’attention du PF était portée à l’extérieur, vers l’héliplateforme. Le PM, qui s’était surtout concentré sur l’héliplateforme, a porté son attention vers l’intérieur de l’hélicoptère et sur les instruments de vol, parce qu’il perdait de vue l’héliplateforme étant donné qu’il occupait le siège de droite. Le PM a reconnu l’assiette en cabré et, conformément aux SOP de la compagnie, a lancé l’annonce « 15 degrés ». Parallèlement, la vitesse a diminué sous la barre des 40 KIAS. Le taux de descente était de 670 pi/min et il augmentait. Aucun des 2 pilotes n’était conscient de la hausse du taux de descente, du faible réglage du couple moteur à 27 % ou de la glissade à gauche qui s’accentuait.
À 13 h 33 min 20 s, le PF a augmenté le collectif jusqu’à un couple moteur de 36 %, et l’assiette en cabré a diminué à environ 12°, même si le PF continuait de déplacer le cyclique vers l’arrière. Les pédales se sont momentanément déplacées vers la position neutre, puis la pression à droite a augmenté de nouveau. Le PM a continué de surveiller l’assiette en cabré de l’hélicoptère à mesure qu’elle diminuait. L’hélicoptère se trouvait à 350 pieds RADALT, à basse vitesse (c.-à-d. moins de 30 KIAS)Note de bas de page 16, et il descendait à environ 850 pi/min.
À 13 h 33 min 26 s, à 250 pieds RADALT dans une assiette en cabré d’environ 12°, tout déplacement vers l’avant avait été perdu, et le taux de descente était de 1200 pi/min et il augmentait. L’angle de glissade atteignait environ 40°, le nez vers la droite, avec une vitesse sol latérale de 18 nœuds. Le PF s’est rendu compte que l’hélicoptère perdait de l’altitude et il a augmenté le collectif, d’abord lentement jusqu’à un couple moteur de 45 %, puis rapidement jusqu’à un couple moteur de 103 %, et il a poussé le cyclique à l’opposé de l’inclinaison vers la droite (causée par la glissade), qui a culminé à 22°. À mesure que le couple moteur augmentait de 45 % à 103 %, à basse vitesse anémométrique, le taux de descente augmentait de 1200 à 1800 pi/min pendant que l’hélicoptère descendait plus bas que l’héliplateforme. Environ 3 secondes après que le couple moteur eut atteint 100 %, le taux de descente a commencé à diminuer (sous 1500 pi/min) (voir l’annexe A).
Le PF n’a pas exprimé verbalement qu’il avait perdu le contact visuel avec l’héliplateforme. Le PF a porté son attention sur les instruments de vol et il a constaté la faible vitesse anémométrique et le taux élevé de descente. Le PM, qui n’était d’abord pas conscient du fait que l’hélicoptère était descendu dans le brouillard et que le PF avait perdu le contact visuel avec l’héliplateforme, a constaté le taux de descente croissant et en a informé le PF. À ce moment-là, le PM s’est rendu compte que l’hélicoptère était dans le brouillard. Le PM était sur le point de lancer une annonce de remise des gaz lorsque le PF lui a dit qu’il amorçait cette manœuvre. Pendant ce temps, l’assiette en cabré de l’hélicoptère a augmenté à presque 17°. Le PM a dit au PF de mettre le nez de l’hélicoptère sur l’horizon, en utilisant l’indicateur d’assiette sur le PFD.
1.1.4 Rétablissement après la descente inopinée
Alors que l’hélicoptère passait sous les 100 pieds RADALT, le PM, qui pouvait voir l’eau directement sous l’appareil, s’est rendu compte de la gravité de la situation et a placé ses mains et ses pieds sur les commandes de vol, puis a manipulé les commandes pour aider le PF à établir une assiette horizontale en prévision d’un impact sur l’eau.
À 13 h 33 min 33 s, alors que l’hélicoptère franchissait 70 pieds RADALT en descente, le levier de pas collectif a été relevé rapidement jusqu’au maximum et le couple moteur a augmenté à 146 %Note de bas de page 17. À mesure que le couple augmentait, le régime du rotor principal (Nr) diminuait rapidement (atteignant un minimum de 77 %), et l’alarme sonore « LOW ROTOR » [régime rotor faible] s’est déclenchéeNote de bas de page 18,Note de bas de page 19. La poussée réduite du rotor de queue, découlant du Nr réduit, s’est avérée insuffisante pour maintenir le contrôle directionnel. Alors que l’hélicoptère atteignait les 40 pieds RADALT, il a fait un mouvement de lacet incontrôlable vers la droite, bien que la pédale gauche de palonnier a été poussée à fond, sur environ 845° en 55 secondesNote de bas de page 20. En raison du faible Nr, les génératrices principales de l’hélicoptère se sont désactivéesNote de bas de page 21, ce qui a ramené le système de commandes automatiques de vol (AFCS) au mode système d’augmentation de stabilité (SAS)Note de bas de page 22, en plus de désactiver le système de référence de cap et d’attitude (AHRS)Note de bas de page 23 et de présenter des écrans multifonctions (MFD) vides au centre et du côté gauche (premier officier). À la suite de ces défaillances du système, les 2 pilotes ont utilisé les instruments de vol de secoursNote de bas de page 24.
À 13 h 33 min 39 s, alors que l’hélicoptère effectuait un mouvement de lacet vers la droite (à plus de 60° par seconde) et que le Nr augmentait lentement à plus de 89 %, les génératrices ont redémarré et les pilotes ont pu arrêter la descente à 13 pieds ou moins de l’eauNote de bas de page 25,Note de bas de page 26 dans des conditions de visibilité réduite dans du brouillard. De l’embrun était visible sur les fenêtres de l’hélicoptère. Au plus près de la plateforme, l’hélicoptère se trouvait à moins de 800 pieds de la partie la plus proche de la structure (à 1100 pieds du point de cheminement de la TCF). À mesure que l’hélicoptère descendait, il s’éloignait de la TCF en dérivant vers l’arrière.
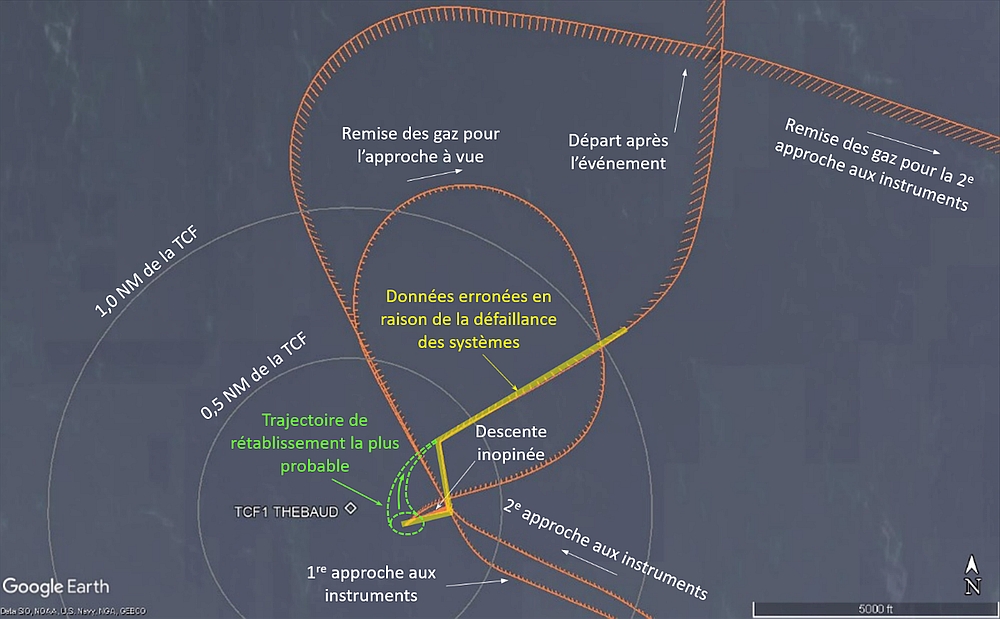
Le commandant de bord, qui pouvait voir l’eau et la TCF à droite de l’hélicoptère, a pris officiellement les commandes de l’hélicoptère et a commencé une montée à vue quasi verticale jusqu’à 150 pieds RADALT, en contre-vérifiant avec les instruments de secours en raison de la visibilité réduite dans le brouillard. Un léger mouvement de lacet vers la droite a persisté pendant la montée, puis s’est estompé à mesure que l’hélicoptère poursuivait son ascension. L’aéronef a viré à droite, élargissant le virage en s’éloignant de la zone de perte de contrôle et en se dirigeant vers le nord-est, passant de 30 KIAS à 80 KIAS (zone en pointillé dans la figure 4; une vue détaillée du profil se trouve à l’annexe B). Un réglage de puissance élevée (couple moteur de 110 % à 120 %) a été maintenu pendant la montée initiale et le Nr a augmenté lentement, retournant généralement à un Nr de 105 % à environ 375 pieds RADALT. Alors que l’hélicoptère dépassait les 650 pieds RADALT, le couple moteur a été réduit à 100 % et a continué de diminuer régulièrement jusqu’à environ 70 % lorsque l’hélicoptère a atteint 1350 pieds RADALT.
À 13 h 34 min 55 s, l’altitude de l’hélicoptère a culminé à 1350 pieds RADALT, puis elle a commencé à diminuer et la vitesse anémométrique a augmenté à 125 KIAS. Pendant ce temps, les pilotes ont tenté 2 fois d’activer le maintien de l’altitude barométrique; toutefois, dans les 2 cas, cela n’a pas fonctionné et un voyant d’avertissement principal s’est allumé. Les pilotes ont aussi appuyé 8 fois sur le bouton de réinitialisation du mode AFCS sur le panneau de l’AFCS, mais sans succès.
À l’insu des pilotes, la vitesse avait augmenté à 148 KIAS, alors que l’hélicoptère franchissait 650 pieds RADALT en descente à 1700 pi/min. Le PF a perçu et stoppé la descente à environ 480 pieds ASL (463 pieds RADALT), alors que l’hélicoptère survolait la pointe nord-ouest de l’île de SableNote de bas de page 27. Le commandant de bord a alors augmenté le pas collectif pour regagner l’altitude perdue. Les pilotes n’étaient pas conscients que l’hélicoptère avait survolé l’île de Sable. L’hélicoptère a été mis en palier à 1500 pieds ASL et les pilotes ont évalué les options qui se présentaient à eux. Sachant qu’il y avait des nuages bas et une faible visibilité à proximité de la TCF et de l’île de Sable, les pilotes ont décidé de retourner à CYHZ, où les conditions météorologiques permettraient d’effectuer une approche d’atterrissage selon les règles de vol à vue (VFR).
Quand les systèmes de l’hélicoptère se sont réactivés, après plusieurs minutesNote de bas de page 28, les pilotes ont constaté que les voyants d’avertissement « APU GCU FAILNote de bas de page 29 » [défaillance du GCU de l’APU], « DCU MISCOMPARENote de bas de page 30 » [erreur de comparaison du DCU] et « LIMIT EXCEEDEDNote de bas de page 31 » [limite dépassée] étaient allumés à la page du système d’affichage des paramètres moteurs et d’alerte de l’équipage (EICAS) des MFD. Les pilotes ont constaté que l’AFCS était dégradé, ce qui rendait plus difficile le pilotage précis de l’hélicoptère.
Les pilotes n’ont pas décelé d’autres problèmes inhabituels de contrôle de l’hélicoptère. Les pilotes croyaient que les avertissements étaient liés au couple moteur pendant la descente. Ils ont donc choisi de retourner à CYHZ sans autre forme de diagnostic.
Le commandant de bord a couplé le pilote automatique de l’hélicoptère à la vitesse anémométrique, au cap et à l’altitude pour regagner CYHZ. L’équipage de conduite a choisi de ne pas déclarer d’urgence. L’hélicoptère a atterri à CYHZ à 14 h 39 sans autre incident.
1.2 Personnes blessées
Il n’y a pas eu de blessé parmi les 2 membres d’équipage ou les 11 passagers.
1.3 Dommages à l’aéronef
1.3.1 Généralités
L’hélicoptère a été retiré du service. On ne connaît pas toute l’étendue des dommages causés par l’événement.
1.3.2 Évaluation des dommages après l’événement
À la suite de l’événement à l’étude, CHO a inspecté la cellule et les moteurs conformément aux instructions de la Sikorsky Aircraft Corporation (Sikorsky) et de General Electric (fabricants, respectivement, de la cellule et du moteur); aucune défaillance n’a été constatée. Ni CHO ni le Bureau de la sécurité des transports du Canada (BST) n’ont pu effectuer un diagnostic du réseau électrique en raison du degré de démontage de l’hélicoptère.
En outre, Sikorsky a fourni à CHO une liste des composants des ensembles du rotor principal et du rotor de queue ainsi que de leurs mécanismes de transmission connexes qui devaient être inspectés ou remplacés afin de remettre l’hélicoptère en service.
Selon Sikorsky [traduction] :
les données enregistrées du HUMS [système de surveillance des cycles de fonctionnement] indiquent que le groupe motopropulseur a été soumis à des amplitudes de couple supérieures aux limites de conception du système et il est donc recommandé de remplacer de nombreux composants. En raison des conditions inhabituelles de l’incident et de la récupération, les charges subies par le mécanisme du rotor principal ne sont pas entièrement comprises pour le moment. Il convient de noter que les composants retirés pourraient être admissibles à une remise en service après une évaluation détaillée et une analyse plus approfondieNote de bas de page 32.
Les composants du rotor et du système d’entraînement ont été envoyés au fabricant pour faire l’objet d’essais additionnels. Toutefois, peu après l’événement, CHO a cessé ses activités à CYHZ. Comme CHO, qui louait l’hélicoptère, n’en avait plus besoin, le propriétaire de l’hélicoptère a choisi de ne pas effectuer d’autres inspections, et le fabricant n’a pas effectué d’analyse technique des composants du rotor et du système d’entraînement. Par conséquent, l’étendue des dommages résultant du surcouple était inconnue au moment de la rédaction du présent rapport. Des inspections additionnelles seraient nécessaires avant de remettre l’aéronef en service.
1.4 Autres dommages
Il n’y a eu aucun autre dommage.
1.5 Renseignements sur le personnel
1.5.1 Généralités
| Commandant de bord | Premier officier | |
|---|---|---|
Licence de pilote |
Licence de pilote de ligne – hélicoptère |
Licence de pilote de ligne – hélicoptère |
Date d’expiration du certificat médical |
1er juin 2020 |
1er juillet 2019 |
Nombre total d’heures de vol |
6713 |
7742 |
Heures de vol sur type |
2242 |
3196 |
Heures de vol au cours des 7 jours précédant l’événement |
8,9 |
5,8 |
Heures de vol au cours des 30 jours précédant l’événement |
20,4 |
21,5 |
Heures de vol au cours des 90 jours précédant l’événement |
114,3 |
131,3 |
Heures de vol sur type au cours des 90 jours précédant l’événement |
114,3 |
131,5 |
Heures de service avant l’événement |
7 |
7 |
Heures hors service avant la période de travail |
18 |
16 |
1.5.2 Commandant de bord
Le commandant de bord était titulaire d’une licence de pilote de ligne – hélicoptère canadienne valide, ainsi que des qualifications de type sur Sikorsky S-92A et S-61. Sa licence était annotée d’une qualification de vol aux instruments du groupe 4.
Le commandant de bord était un pilote extracôtier expérimenté, qui comptait plus de 20 ans d’expérience comme pilote de S-61 dans l’Aviation royale canadienne (ARC) et plus de 5 ans comme commandant de bord de S-92A civil. De 2014 à 2017, le commandant de bord a travaillé comme commandant de bord de S-92A pour un autre exploitant civil d’hélicoptères extracôtiers, établi à Terre-Neuve. En 2017, il a rejoint CHO en tant que commandant de bord de S-92A et agent désigné du suivi des données de vol des hélicoptères (HFDM).
Il avait accumulé plus de 1100 heures de vol dans des conditions météorologiques de vol aux instruments (IMC).
Le dossier de formation du commandant de bord indique qu’il avait achevé :
- une formation initiale puis périodique en gestion des ressources de l’équipage (CRM) en décembre 2017 et mars 2019, respectivementNote de bas de page 33;
- une formation périodique sur simulateur de vol, qui portait entre autres sur les situations d’incapacité des pilotes, le 9 mars 2019.
Rien n’indique que la fatigue ou d’autres facteurs physiologiques préexistants aient pu nuire au rendement du commandant de bord. De plus, rien n’indique que le commandant de bord aurait ressenti une pression excessive pour effectuer le vol à l’étude.
1.5.3 Premier officier
Le premier officier, qui était également un commandant de bord de S-92A chez CHO, possédait une licence de pilote de ligne – hélicoptère canadienne, avec des qualifications de type sur les Sikorsky S-92A, S-61 et S-76, et sur le Bell 206. Sa licence était annotée d’une qualification de vol aux instruments du groupe 4.
Le certificat médical de catégorie 1 du premier officier avait expiré le 1er juillet 2019, soit près de 1 mois avant l’événement. Le premier officier, qui avait eu 60 ans quelques mois avant son dernier examen médical de pilote le 3 décembre 2018, ne savait pas que la période de validité de son certificat médical était passée à 6 mois, conformément à l’alinéa 404.04(6.2)b) du Règlement de l’aviation canadien (RAC).
Le système informatique de suivi des qualifications du personnel de CHO indiquait par erreur que le premier officier était âgé de moins de 60 ans. Par conséquent, le personnel de gestion de CHO ne savait pas que le certificat médical de pilote du premier officier avait expiré.
À l’instar du commandant de bord, le premier officier était un pilote extracôtier expérimenté, qui possédait une vaste expérience à bord du S-61 au sein de l’ARC et à bord du S-92A dans l’environnement extracôtier civil. De 2008 à 2017, le premier officier a piloté comme commandant de bord de S-92A pour un autre exploitant extracôtier établi à Terre-Neuve. En 2017, le premier officier a rejoint CHO en tant que commandant de bord de S-92A.
Il avait accumulé plus de 1300 heures de vol en IMC.
Le dossier de formation du premier officier indique qu’il avait achevé :
- une formation initiale puis périodique en CRM en juin 2018 et novembre 2018, respectivement;
- une formation périodique sur simulateur de vol, qui portait entre autres sur les situations d’incapacité du pilote, le 24 novembre 2018.
Rien n’indique que la fatigue ou d’autres facteurs physiologiques préexistants aient pu nuire au rendement du premier officier. De plus, rien n’indique que le premier officier aurait ressenti une pression excessive pour effectuer le vol à l’étude.
1.5.4 Considérations relatives à l’équipage
Les pilotes de l’événement à l’étude, qui étaient tous deux des commandants de bord très expérimentés, se connaissaient depuis plusieurs années et pilotaient ensemble périodiquement. Les pilotes avaient beaucoup de confiance et de respect à l’égard de leurs capacités de pilote respectives. L’enquête a permis de déterminer qu’il y avait un fort esprit d’équipe et une forte harmonisation des modèles mentaux pendant la majeure partie du vol à l’étude. Les pilotes interagissaient et coordonnaient les activités avec une facilité et une efficacité considérables. Aucun des 2 pilotes ne sentait qu’il se trouvait dans une situation causant un malaise. Rien n’indiquait l’existence de problèmes reliés au rapport d’autorité dans le poste de pilotageNote de bas de page 34.
Le commandant de bord et le premier officier avaient déjà effectué de nombreux vols où ils n’avaient pas pu atterrir sur une installation extracôtière en raison des conditions météorologiques du moment. Ces types de vols, appelés « boomerang » par les pilotes et les passagers, sont assez courants dans le contexte de vols d’hélicoptère extracôtiers au large de la côte Est du Canada. Les pilotes avaient également déjà effectué des approches à vue vers une héliplateforme située au-dessus d’une couche de brouillard.
1.6 Renseignements sur l’aéronef
1.6.1 Généralités
| Constructeur | Sikorsky Aircraft Corporation |
|---|---|
| Type, modèle et immatriculation | S-92A, C-GICB |
| Année de construction | 2009 |
| Numéro de série | 920121 |
| Date d’émission du certificat de navigabilité | 7 avril 2018 |
| Total d’heures de vol cellule | 5652,9 heures |
| Type de moteur (nombre de moteurs) | General Electric CT7-8A (2) |
| Type de rotor (nombre de pales) | Entièrement articulé (4) |
| Masse maximale autorisée au décollage | 26 500 livres |
| Types de carburant recommandés | JP-4, JP-5, JP-8, JET A, JET A-1, JET B, carburéacteur no 3 |
| Type de carburant utilisé | Jet A-1 |
Le S-92A est un hélicoptère bimoteur quadripale de moyen tonnage construit par Sikorsky (figure 5). L’hélicoptère de l’événement à l’étude était configuré pour transporter 2 membres d’équipage, 1 réservoir auxiliaire interne de carburant et jusqu’à 16 passagers dans la cabine. Les dossiers indiquent que l’hélicoptère était certifié et équipé conformément aux règlements en vigueur et qu’il respectait les limites prescrites de masse et de centre de gravité. Il n’y avait aucun signe de mauvais fonctionnement d’un système de l’aéronef avant la descente inopinée.

1.6.2 Tableau de bord du S-92A
Le tableau de bord du S-92A de CHO est composé de 5 MFD Collins Aerospace (figure 6). Lors du vol à l’étude, les MFD 1 et 4 étaient réglés à la page de l’écran de vol principal, les MFD 2 et 3, à la page EICAS, et le MFD 5, à la page de navigation. Il s’agissait de la configuration normalisée de CHO pour les vols extracôtiers.
![Tableau de bord du S-92A de Canadian Helicopters Offshore – configuration standard (Source : Canadian Helicopters Offshore, <em>Sikorsky S-92A Standard Operating Procedures for 704 Commuter and 702 Aerial Work</em>, no 4.0 [1<sup>er</sup> mai 2019], section 1.14.2, traduction par le BST)](/sites/default/files/fra/rapports-reports/aviation/2019/a19a0055/images/a19a0055-figure-06.jpg)
Légende :
- EICAS : système d’affichage des paramètres moteurs et d’alerte de l’équipage
- NAV : navigation
En cas de défaillance d’un MFD, les pilotes doivent utiliser les instruments de vol de secours situés au-dessus du MFD 5 (figure 7).
![Emplacement des instruments de vol de secours (Source : Sikorsky, <em>FAA Approved Rotorcraft Flight Manual : Sikorsky Model S-92A, </em>SA S92A-RFM-003, révision 8 [2 mai 2012], partie 2, section I, chapitre 4 : Avionics Management System, p. I-4-31, traduction par le BST)](/sites/default/files/fra/rapports-reports/aviation/2019/a19a0055/images/a19a0055-figure-07.jpg)
1.6.3 Alimentation électrique
1.6.3.1 Généralités
Deux génératrices principales et un groupe auxiliaire de bord (APU) de secours fournissent une alimentation électrique en courant alternatif (CA). Le S-92A est également doté de 2 convertisseurs à courant continu (CC) alimentés par CA, d’un convertisseur de secours alimenté par CA et d’une batterie nickel-cadmium de 15 ampères-heures qui fournit une alimentation en CCNote de bas de page 35.
1.6.3.1.2 Génératrices principales
Les génératrices principales produisent à 115 volts CA, 75 kilovoltampères CA comme source principale d’alimentation électrique de l’hélicoptère. source principale d’alimentation électrique de l’hélicoptère. Les génératrices sont entraînées par les modules d’accessoires de la transmission principale, lorsque le Nr est à plus de 96 % au sol et à plus de 80 % dans les airsNote de bas de page 36. Si le Nr diminue sous les 80 % alors que l’aéronef est en vol, les génératrices principales tombent hors service, et les avertissements « AC GEN 1 FAIL » [défaillance de la génératrice CA 1] et « AC GEN 2 FAIL » [défaillance de la génératrice CA 2] s’affichent sur l’EICAS.
Si les 2 génératrices principales présentent une défaillance ou tombent hors service en vol et si l’alimentation CA de secours (de l’APU) n’est pas disponible, seuls les systèmes alimentés par les bus batterie sont disponibles. Dans ce cas, les perturbations de système suivantes, pertinentes dans le contexte de l’événement à l’étude, se produisent :
- les pilotes automatiques sont désactivés;
- les commandes de vol reviennent par défaut au mode SAS;
- l’AHRS est désactivé;
- le circuit de compensation (cyclique, collectif et lacet) est inopérant;
- les MFD du centre et du copilote (MFD 1, 2 et 5) s’effacent;
- le contrôle actif des vibrations (AVC) revient par défaut à l’état dégradéNote de bas de page 37, Note de bas de page 38;
- le déploiement automatique de flotteurs est inopérant Note de bas de page 39, Note de bas de page 40.
1.6.3.3 Groupe auxiliaire de bord
Le S-92A est doté d’une génératrice auxiliaire sans balai à entraînement par APU refroidie à l’air qui produit 115 VCA. La génératrice APU, dont l’utilisation est permise en vol, procure une alimentation en CA au sol et en cas d’urgence lorsque les 2 génératrices sont hors service. L’APU consomme environ 57 livres de carburant par heureNote de bas de page 41.
Si l’APU fonctionne et que les 2 génératrices principales sont défaillantes ou tombent hors service, la génératrice APU fournira une alimentation réduite aux bus CA. L’APU n’est pas en mesure d’accepter toutes les charges CA. Ainsi, une réduction automatique de la charge se produit, et les éléments suivants sont désactivés [traduction] :
- le dégivreur de pare-brise du pilote et du copilote;
- le dégivreur du moteur no 1;
- le dégivreur des pales du rotor principal et du rotor de queue;
- le système AVC;
- le second compresseur du système de climatisation (s’il est installé)Note de bas de page 42.
Les SOP de CHO indiquaient que pour disposer d’une source d’alimentation CA de secours, l’APU doit être enclenché au cours d’une descente d’urgence ou d’une évacuation d’urgence extracôtière ou au-dessus de la terre, et avant de mener des activités de recherche et de sauvetage en IMC ou par faible visibilitéNote de bas de page 43,Note de bas de page 44.
Au moment de l’événement, l’APU de l’hélicoptère n’était pas en marche, et les SOP de CHO n’exigeaient pas qu’il le soit pendant une approche extracôtière. L’enquête a permis de déterminer que certains exploitants de S-92A enclenchaient l’APU par mesure de précaution avant d’entreprendre certaines activités extracôtières. D’autres exploitants de S-92A ont fait l’essai de cette procédure, mais l’ont par la suite abandonnée, en raison d’une maintenance accrue résultant de cycles d’APU additionnels.
Dans l’événement à l’étude, le voyant d’avertissement « APU GCU FAIL » s’est allumé après la descente inopinée. Par conséquent, les pilotes n’ont pas pu enclencher l’APU lorsqu’ils sont revenus à CYHZ, conformément à la procédure normale d’arrêt. Selon le fabricant, l’activation du voyant d’avertissement « APU GCU FAIL » dans l’événement à l’étude pourrait être attribuée à la fonction de test intégré continu du système; toutefois, il n’a pas été possible de déterminer le déclencheur précis de cette défaillance. En raison de cette défaillance, l’APU n’aurait pas été disponible en vol si une alimentation CA d’urgence avait été nécessaire au retour vers CYHZ.
1.6.4 Systèmes d’avertissement de proximité du sol améliorés
1.6.4.1 Généralités
Bien que cela ne soit pas exigé par les règlements, l’hélicoptère de l’événement à l’étude était doté d’un système d’avertissement de proximité du sol amélioré (EGPWS)Note de bas de page 45,Note de bas de page 46. Le modèle installé dans l’hélicoptère de l’événement à l’étude, le Honeywell Mk XXII, a été initialement commercialisé en 2001. Le système se compose de modes de base, reposant sur l’altitude RADALT, et de modes de balayage frontal (bloqués à moins de 70 KIAS), reposant sur la position du système mondial de positionnement (GPS) par rapport aux bases de données de relief et d’obstaclesNote de bas de page 47. Les différents modes de l’EGPWS sont décrits dans le manuel de vol du giravion (RFM) du S-92A.
1.6.4.2 Mode 1
Le mode 1 a été conçu dans le but de [traduction] « détecter quand l’aéronef descend en direction du relief à un taux élevé compte tenu de son altitude relative au-dessus du reliefNote de bas de page 48 ». Le mode 1 est bloqué à bord du S-92A. Selon Sikorsky, le mode 1 était susceptible de causer des alertes injustifiées sur le S-92A lors des essais de certification initiale en 2002. Sikorsky croyait que ces alertes injustifiées réduiraient indûment la confiance du pilote dans le système. Par conséquent, Sikorsky a demandé à Honeywell de ne pas inclure le mode 1 dans la configuration de l’EGPWS Mk XXII pour le S-92A. L’enveloppe du mode 1 a ensuite été mise à jourNote de bas de page 49 en 2003 pour répondre aux préoccupations antérieures concernant les alertes injustifiées; cependant, le mode 1 est demeuré bloqué à bord du S-92A. Après des évaluations sur simulateur en mars 2018, Sikorsky a décidé de lancer le processus d’activation du mode 1.
En mars 2020, Honeywell a publié un bulletin de service pour la mise à jour sur le terrain de l’EGPWS Mk XXII vers la version EGPWS-036 du logicielNote de bas de page 50. Cette version du logiciel intègre les recommandations formulées par la Civil Aviation Authority du Royaume-Uni, y compris une enveloppe améliorée du mode 1 (c.-à-d. détection précoce)Note de bas de page 51. Sikorsky prévoit d’intégrer la version EGPWS-036, avec le mode 1 activé, lorsqu’il installera la version 11 du système de gestion avionique (AMS), dont le lancement aux États-Unis et à l’échelle mondiale est prévu pour la fin de 2021 et le début de 2022, respectivement. Le fabricant n’a pas précisé combien de temps il faudrait pour que la version 11 de l’AMS soit installée sur toute la flotte de S-92A.
L’enquête a permis de déterminer que le Mk XXII est installé à bord de nombreux types d’hélicoptères différents; cependant, le S-92A est le seul hélicoptère doté du Mk XXII dont le mode 1 est bloqué.
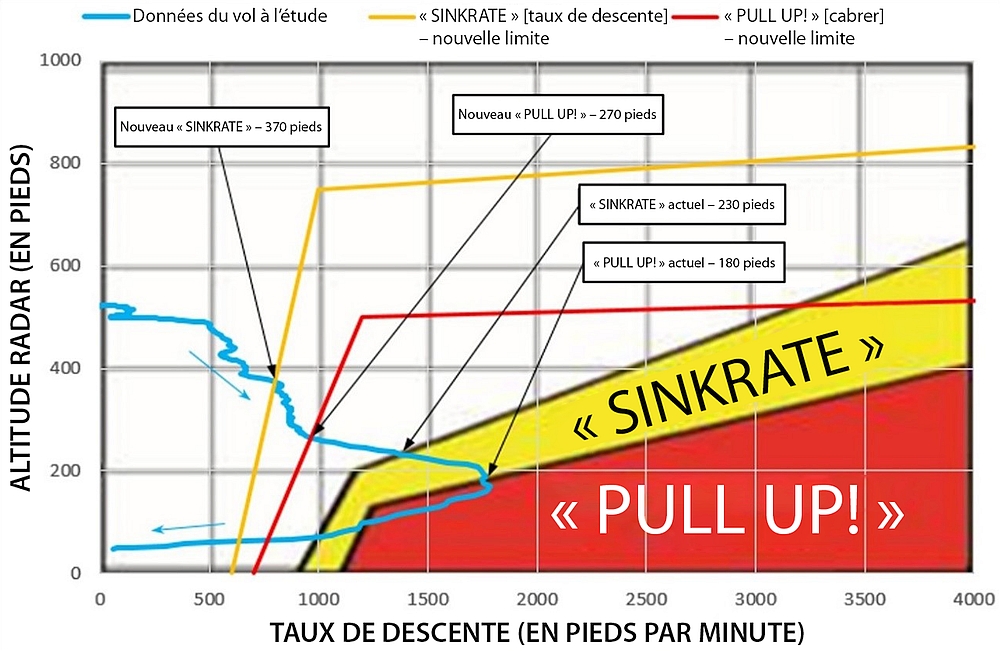
L’hélicoptère de l’événement à l’étude est entré dans l’enveloppe d’alerte « SINKRATE » du mode 1 alors qu’il franchissait 230 pieds RADALT en descente, puis dans l’enveloppe d’alerte « PULL UP! » lorsqu’il franchissait 180 pieds RADALT en descente. La nouvelle enveloppe du mode 1 de l’EGPWS-036 aurait déclenché les alertes « SINKRATE » (370 pieds RADALT) et « PULL UP! » (270 pieds RADALT) considérablement plus tôt. Les alertes applicables, avec la version EGPWS-036, auraient été déclenchées environ 9 et 4 secondes respectivement avant les alertes correspondantes du mode 1 actuel. Toutefois, puisque le mode 1 était bloqué, les pilotes n’ont reçu aucun avertissement sonore ni visuel.
La figure 8 présente le profil du vol à l’étude au regard de l’enveloppe d’alerte actuelle du mode 1 et de la nouvelle enveloppe (EGPWS-036).
1.6.4.3 Mode 2
Le mode 2 de l’EGPWS fournit des alertes lorsque l’aéronef s’approche rapidement du relief. Le système filtre les données d’altitude radar de l’aéronef pour déterminer la vitesse de rapprochement vers le relief, et il déclenche des alertes quand cette vitesse est élevée compte tenu de la hauteur de l’aéronef par rapport au relief.
1.6.4.4 Mode 3
Le mode 3 fournit des alertes lorsque l’aéronef perd beaucoup d’altitude immédiatement après le décollage. Selon le RFM du S-92ANote de bas de page 52, le mode 3 s’active après après le décollage, lorsque le train d’atterrissage est relevé ou lorsque la vitesse est supérieure à 50 KIAS. Le mode 3 demeure en fonction jusqu’à ce que l’hélicoptère prenne suffisamment d’altitude pour que les autres modes assurent la protection contre les impacts sans perte de contrôle (CFIT) (normalement 60 secondes après le décollage). Cependant, en prévision de déplacements de l’hélicoptère dans un environnement d’aéroport ou lors de décollages interrompus, le mode 3 se désactive lorsque lorsque la vitesse anémométrique baisse sous les 50 KIAS et que le train d’atterrissage est sorti. Selon le constructeur de l’aéronef, il s’agit ainsi d’éviter l’alerte sonore « DON’T SINK » du mode 3 pendant une circulation en vol (décollage, manœuvre, posé). Le constructeur a aussi déterminé qu’un décollage normal dépasse les 50 KIAS. Par conséquent, si l’hélicoptère descend et ralentit sous 50 KIAS, la logique du système suppose que le pilote a l’intention d’atterrir. Ce mode ne tient pas compte du taux de descente.
1.6.4.5 Mode 4
Le mode 4 est conçu pour alerter le pilote lorsque l’hélicoptère descend sous une marge ou un plancher prédéterminé de franchissement du relief. Ce mode comporte 3 sous-modes, selon la vitesse anémométrique de l’hélicoptère et la configuration du train d’atterrissage.
Le mode 4A est actif en croisière et pendant l’approche lorsque le train est rentré. Une alerte sonore « TOO LOW, TERRAIN » retentit et un voyant d’avertissement « TERRAIN » jaune s’allume à l’indicateur directeur d’assiette (ADI) lorsque la vitesse anémométrique est supérieure à 60 KIAS et que l’altitude RADALT est inférieure à 150 pieds. Une alerte sonore « TOO LOW, GEAR » retentit, un voyant d’avertissement « GEAR » jaune s’allume à l’ADI et « LDG GEAR » s’allume au tableau principal des voyants d’alarme lorsque la vitesse anémométrique est de 60 KIAS ou moins et que l’altitude RADALT est inférieure à 150 pieds.
Le mode 4B est actif en croisière et pendant l’approche lorsque le train est sorti. Le cas échéant, une alerte sonore « TOO LOW, TERRAIN » retentit lorsque l’altitude RADALT est inférieure à 100 pieds et que la vitesse anémométrique est supérieure à 120 KIAS. À mesure que la vitesse anémométrique diminue, la limite d’alerte baisse jusqu’à 10 pieds et 80 KIAS.
Le mode 4C est actif durant la phase de décollage lorsque la vitesse anémométrique est supérieure à 50 KIAS et que le train d’atterrissage est rentré. Ce mode veille à ce que l’aéronef s’éloigne du sol après le décollage en fonction d’un plancher de 75 % de l’altitude radar atteinte. Une alerte sonore « TERRAIN » retentit lorsque la marge de franchissement du relief est inférieure à une altitude plancher dont la valeur évolue. Dans ce mode, à mesure que la vitesse anémométrique diminue, la limite d’alerte baisse jusqu’à 10 pieds et 80 KIAS.
1.6.4.6 Mode 5
Le mode 5 est une alerte d’alignement de descente conçue pour avertir les pilotes que l’hélicoptère est descendu sous l’alignement de descente pendant une approche par système d’atterrissage aux instruments (ILS).
1.6.4.7 Mode 6
Le mode 6 fournit des alertes en cas d’angle d’inclinaison excessif (en fonction de l’altitude RADALT, de l’assiette en roulis et de la vitesse angulaire de roulis) et un avertissement de contact queue-sol (en fonction de l’altitude RADALT, de l’assiette en tangage, de la vitesse angulaire de tangage et du taux de descente). Des avis d’altitude sont également fournis.
1.6.4.8 Mode 7
Le mode 7, dont l’EGPWS de l’hélicoptère de l’événement à l’étude n’était pas doté, [traduction] « protège contre la perte de vitesse anémométrique en approche en utilisant les paramètres d’entrée de l’IAS [vitesse anémométrique indiquée] et du couple totalNote de bas de page 53 ». Ce mode fait partie de la mise à jour EGPWS-036 du logiciel de Honeywell. Cependant, le mode 7 ne sera pas homologué sur le S-92A avec l’EGPWS-036 en raison de préoccupations quant à l’utilisation d’une alerte sonore « CHECK AIRSPEED » plutôt qu’une alerte sonore « POWER POWER ».
Une comparaison des données du vol à l’étude avec la limite d’alerte du mode 7 montre qu’une alerte « CHECK AIRSPEED » aurait été déclenchée quand la vitesse anémométrique a chuté sous les 45 KIAS. À ce moment-là, l’hélicoptère franchissait 420 pieds RADALT en descente. Cette alerte se présente environ 13 secondes avant l’alerte du mode 1 actuel et 4 secondes avant l’alerte du nouveau mode 1. Par conséquent, compte tenu des paramètres de vol particuliers de cet événement, le nouveau mode 7 aurait donné la première alerte. Une mesure corrective rapide suite à une alerte du mode 7 pourrait prévenir une situation d’alerte du mode 1. L’enveloppe du mode 7 spécifique au S-92A, avec les données de l’événement superposées, est présentée à l’annexe C.
1.6.4.9 Alertes pendant l’événement
En raison de la configuration de l’hélicoptère (train d’atterrissage sorti) et de la vitesse anémométrique au cours de la descente inopinée (inférieure à 40 KIAS), aucune des alertes de mode de l’EGPWS décrites ci-dessus ne s’est déclenchée.
1.6.4.10 Recommandation A16-10 du BST
Dans l’événement à l’étude, l’hélicoptère était doté d’un EGPWS, même si la réglementation ne l’exigeait pas. Étant donné qu’à l’heure actuelle, il n’y a aucune obligation de doter les hélicoptères commerciaux d’un EGPWS, rien n’empêche un fabricant ou un exploitant de bloquer des modes d’un EGPWS installé, ce qui réduit les capacités du système. Dans l’événement à l’étude, la capacité globale du système était réduite car le mode 1 était bloqué. Ce blocage empêchait les pilotes de recevoir les alertes et les avertissements du mode 1 de l’EGPWS pendant l’événement.
À la suite d’un accident de type CFIT survenu en 2013 mettant en cause un hélicoptère Sikorsky S-76, qui effectuait un départ de nuit de l’aéroport de Moosonee (Ontario)Note de bas de page 54 et qui n’était pas doté d’un système d’avertissement et d’alarme d’impact, le BST a recommandé que :
le ministère des Transports exige l’installation de systèmes d’avertissement et d’alarme d’impact à bord d’hélicoptères commerciaux qui effectuent des vols la nuit ou dans des conditions météorologiques de vol aux instruments.
Recommandation A16-10 du BST
En décembre 2020, dans sa plus récente réponse, TC indiquait qu’il était d’accord en principe avec la recommandation. Le ministère a souligné ce qui suit :
- La question des systèmes d’avertissement et d’alarme d’impact pour hélicoptères (HTAWS) continue de faire l’objet de discussions au sein du groupe de travail de TC sur les VFR de nuit. À ce jour, ce groupe de travail n’a formulé aucune recommandation.
- TC prévoit de traiter les questions de sécurité pour les exploitants d'hélicoptères qui effectuent uniquement des opérations VFR (de jour ou de nuit) séparément de ceux qui effectuent également des opérations IFR
- Pour les hélicoptères exploités en VFR seulement, TC continuera d'encourager l'utilisation du HTAWS et d'autres capacités, tout en poursuivant ses efforts pour modifier les articles 602.114 et 602.115 du Règlement de l'aviation canadien (RAC) afin de redéfinir les repères visuels pour le vol de nuit.
- Pour les hélicoptères exploités en IFR, TC évaluera la lacune de sécurité, en gardant à l’esprit la récente recommandation de l’Organisation de l’aviation civile internationale d’élaborer la réglementation en fonction des capacités.
En février 2021, dans sa réévaluation de la dernière réponse de TC, le BST a fait remarquer que puisque rien n’indique clairement quelles mesures seront prises ou quand elles seront achevées, on ne sait pas comment, ni même si ces mesures répondront à l'esprit de la présente recommandation.
Par conséquent, à l’égard de la réponse de TC à la recommandation A16-01, le Bureau estime que son évaluation est impossible Note de bas de page 55.
1.6.5 Système de commandes automatiques de vol
1.6.5.1 Généralités
L’hélicoptère de l’événement à l’étude était équipé d’un AFCS qui stabilise l’hélicoptère en lacet, en roulis et en tangage pour assurer un vol compensé sans intervention dans la plupart des conditions de vol stable. Il le fait au moyen d’un circuit de compensation, du SAS, des fonctions de maintien de l’assiette (ATT) et d’un directeur de vol couplé (CFD).
La commande cyclique comprend un frein électromagnétique et un ressort. Cela permet au pilote de régler une assiette qui sera utilisée par le système de compensation cyclique comme référence pour la tenue en tangage et en roulis. Les commandes sont alors réglées au cran de référence. Un système de compensation du même type est utilisé sur le collectif pour assurer le maintien d’une position de référence, d’une altitude ou d’une vitesse ascensionnelle sélectionnée par le pilote. Le lacet est compensé selon une position des pédales, une référence de cap ou une référence de glissade latérale commandée par le pilote ou le pilote automatique.
Quatre vérins de compensateur électromécaniques assurent le référencement des commandes et le gradient de sensation artificielle. Chaque vérin est doté d’un système de débrayage qui permet aux pilotes d’annuler, au besoin, l’effet des commandes des vérins de compensateur. Ces vérins assurent le maintien de l’assiette et l’action du CFDNote de bas de page 56. Il n’est possible de coupler le CFD à l’axe de tangage ou de roulis que si la vitesse anémométrique est supérieure à 50 KIAS (VMINI)Note de bas de page 57. Le maintien de l’altitude RADALT peut être activé à n’importe quelle vitesseNote de bas de page 58.
1.6.5.2 Débrayage des compensateurs
Il est possible de désactiver les commandes des vérins des compensateurs en appuyant sur le bouton de débrayage du compensateur cyclique (cercle plein à la figure 9), sur la gâchette de débrayage du compensateur collectif (cercle plein à la figure 10) ou sur les pédales du rotor de queue. Les vérins peuvent aussi être commandés par les poussoirs des compensateurs à 4 voies situés sur le cyclique et le collectif (cercles pointillés aux figures 9 et 10).
![Manche cyclique du S-92A, débrayage du compensateur (cercle plein); poussoir du compensateur (cercle pointillé) (Source : Sikorsky, <em>FAA Approved Rotorcraft Flight Manual : Sikorsky Model S-92A</em>, SA S92A-RFM-003, révision 8 [2 mai 2012], partie 2, section I, avec annotations et traduction du BST)](/sites/default/files/fra/rapports-reports/aviation/2019/a19a0055/images/a19a0055-figure-09.jpg)
En mode ATTNote de bas de page 59, le fait d’enfoncer puis relâcher le bouton de débrayage du compensateur cyclique aura pour effet de modifier l’effort de compensation cyclique de référence selon la nouvelle position du manche et l’assiette en tangage et en roulis correspondante. Si le pilote applique une force au cyclique sans enfoncer le bouton de débrayage du compensateur, cela [traduction] « entraînera un effort croissant vers la référenceNote de bas de page 60 ».
Des changements d’assiette peuvent également être effectués à l’aide du bouton-poussoir de compensation de l’AFCS. Le fait d’appuyer sur les poussoirs transversaux de compensation de l’AFCS déplace le cyclique à gauche ou à droite à un taux de roulis de 3° à 5° par seconde, jusqu’à une inclinaison maximale de 30°. Le fait d’appuyer sur les boutons-poussoirs longitudinaux de compensation de l’AFCS modifie l’assiette en tangage à un taux de 2° à 3° par secondeNote de bas de page 61.
![Manche collectif du S-92A, débrayage du compensateur (cercle plein); compensateur de cap (cercle pointillé) (Source : Sikorsky, <em>FAA Approved Rotorcraft Flight Manual : Sikorsky Model S-92A</em>, SA S92A-RFM-003, révision 8 [2 mai 2012], partie 2, section I, avec annotations et traduction du BST)](/sites/default/files/fra/rapports-reports/aviation/2019/a19a0055/images/a19a0055-figure-10.jpg)
De même, en mode ATT, le fait d’appuyer sur la gâchette de débrayage du compensateur collectif puis de la relâcher aura pour effet de réinitialiser la position de référence du référence du collectif. Le poussoir du compensateur collectif et de cap augmentera ou réduira le collectif, augmentant ou diminuant ainsi le couple moteur.
Le SAS de l’hélicoptère assure la stabilisation de base de l’aéronef. Le SAS détectera une perturbation de l’aéronef, par exemple une assiette en cabré intempestive en raison de rafales de vent, et effectuera des commandes légères mais immédiates pour arrêter la perturbation de l’aéronef. Cela s’appelle amortissement du taux. Le SAS ne tentera pas de ramener l’aéronef à son assiette d’origine. Le pilote peut basculer entre le mode assiette et le mode SAS au moyen d’un bouton sur le panneau de l’AFCS étiqueté « ATT/SAS »Note de bas de page 62.
Appuyer sur le bouton de débrayage du compensateur cyclique et le tenir enfoncé désactive le frein magnétique qui fournit une sensation artificielle. Cela permet au pilote de bouger le cyclique avec très peu de résistance. Cependant, cela retire également le cran de référence des commandes de vol pour l’assiette de tangage et de roulis compensée. Par conséquent, tant que le bouton est enfoncé, le manche ne regagne pas sa position précédemment compensée si le pilote réduit la pression sur le cyclique. Essentiellement, enfoncer et tenir enfoncé le bouton de débrayage du compensateur cyclique réduit le degré d’augmentation de l’AFCS, puisque le pilote doit interpréter les repères visuels externes ou les indications des instruments, puis actionner manuellement les commandes pour effectuer des changements d’assiette, sans bénéficier d’un type quelconque de fonction de maintien d’assiette.
Lors d’essais effectués par l’ARC, les pilotes d’hélicoptère qui utilisaient le mode ATT tout en réduisant au minimum l’utilisation du débrayage du compensateur avaient une bien meilleure maîtrise dans un DVE que les pilotes qui tentaient de voler avec le bouton de débrayage du compensateur enfoncé. Les pilotes qui pilotaient en tenant le bouton de débrayage du compensateur enfoncé « ne reconnaissaient souvent pas les taux de tangage ou de roulis résiduels (ou les vitesses verticales) en raison des repères réduits, ce qui diminuait la maîtrise de l’hélicoptère et entraînait des approches inefficaces ou, dans le pire des cas, un impact au solNote de bas de page 63 ».
Le CH146 Griffon Standard Manoeuvre Manual de l’ARC indique qu’utiliser le compensateur d’effort aide à maintenir la stabilité du vol stationnaire et de l’assiette de l’aéronef dans le cadre d’opérations de nuit ou au-dessus de l’eauNote de bas de page 64.
De plus, le manuel Air Mobility CH149 Cormorant Operations de l’ARC met en garde contre l’utilisation du bouton de débrayage du compensateur cyclique et indique ce qui suit [traduction] :
Dans des environnements à faible visibilité (IMC, nuit, hélitreuillage, etc.), le pilote devrait essayer de maintenir la rétention de l’assiette en évitant d’utiliser le bouton de débrayage du compensateur cyclique. De petits changements d’assiette précis peuvent être effectués uniquement à l’aide du poussoir du compensateur cyclique. Sinon, le pilote peut facilement déplacer le cyclique en mode manœuvre, puis utiliser le poussoir du compensateur pour atténuer l’effort de maîtrise, ce qui se traduit par des vitesses de compensation plus élevéesNote de bas de page 65.
Le RFM du S-92A ne fournit aucune directive sur le vol avec le bouton de débrayage du compensateur enfoncé ni sur les risques potentiels connexes. Selon Sikorsky, il s’agit d’une question de technique du pilote. De même, les SOP de CHO ne fournissaient aucune indication quant aux risques associés au vol avec le bouton de débrayage du compensateur enfoncé.
1.7 Renseignements météorologiques
1.7.1 Conditions météorologiques à l’aéroport international Stanfield d’Halifax
Tout au long du vol à l’étude, des conditions VFR étaient présentes et étaient prévues à CYHZ. Les vents étaient légers, la visibilité était de 15 SM, il y avait de faibles averses de pluie, et le plafond signalé n’était pas inférieur à 1300 pieds AGL.
1.7.2 Conditions météorologiques à l’installation centrale Thebaud
Un observateur météorologique privé à TCF émet des bulletins météorologiques à chaque heure et lorsque les conditions le justifient. L’observateur météorologique transmet également des renseignements météorologiques aux équipages de conduite qui volent à proximité de la TCF. Les conditions météorologiques dans les heures précédant l’événement et peu après sont résumées au tableau 3.
| Moment de l’observation | Vents (direction/vitesse) | Visibilité (SM) | État du ciel | Temp. (°C) | Point de rosée (°C) | Altimètre (inHg) / Remarques |
|---|---|---|---|---|---|---|
9 h |
240°V/17 kt |
1/8 dans du brouillard |
Visibilité verticale de 200 pieds |
16 |
–* |
29,95 |
10 h |
250°V/19 kt |
2/8 dans du brouillard |
Visibilité verticale de 200 pieds |
16 |
– |
29,96 |
11 h |
260°V/18 kt |
1/8 dans du brouillard |
Visibilité verticale de 300 pieds |
17 |
– |
29,98 |
11 h 15 |
290°V/18 kt |
9 |
Plafond de nuages fragmentés à 300 pieds AGL |
17 |
– |
29,98 Remarque – faible brouillard dans le secteur |
11 h 42 |
290°V/14 kt |
1 2/4 dans du brouillard et de la brume |
Plafond de nuages fragmentés à 100 pieds AGL; couvert nuageux à 500 pieds AGL |
17 |
– |
29,99 |
12 h |
280°V/14 kt |
3 |
Plafond de nuages fragmentés à 100 pieds AGL; couvert nuageux à 500 pieds AGL |
17 |
– |
29,99 |
12 h 20 |
300°V/09 kt |
5/8 |
Plafond de nuages fragmentés à 100 pieds AGL; une autre couche de nuages fragmentés à 500 pieds AGL |
18 |
17 |
29,98 |
13 h |
300°V/08 kt |
5/8 |
Plafond de nuages fragmentés à 300 pieds AGL; plafond couvert à 500 pieds AGL |
18 |
17 |
29,98 |
14 h |
Aucune donnée** |
Aucune donnée** |
Aucune donnée** |
Aucune donnée** |
Aucune donnée** |
Aucune donnée** |
15 h |
130°V/10 kt |
2/8 |
Plafond couvert à 200 pieds AGL |
17 |
– |
29,95 |
* À certains moments, le point de rosée n’était pas relevé sur les instruments météorologiques de la TCF.
**Non communiqué parce que l’observateur météorologique était en contact avec les pilotes de l’événement à l’étude et qu’ils retournaient à CYHZ.
À 12 h 45, environ 5 minutes après que les pilotes eurent établi le premier contact avec la TCF, l’observateur météorologique les a informés que la visibilité se situait entre ¾ SM et 1 SM, et qu’il y avait une couche nuageuse fragmentée dont la base était à 500 pieds AGL. Pendant que l’aéronef de l’événement à l’étude volait à proximité de la TCF, l’observateur météorologique a fourni des mises à jour périodiques sur les vents et la visibilité aux pilotes.
Entre 12 h 55 et 13 h 45, un navire de réserve à proximité de la TCFNote de bas de page 66 a signalé un épais brouillard causant une visibilité inférieure à 0,5 NM. Le navire a aussi signalé que les vents à la surface soufflaient à 12 nœuds du 270°V, mais s’étaient calmés pendant l’approche visuelle de l’hélicoptère de l’événement à l’étude.
Au cours des 3 approches, les pilotes de l’événement à l’étude ont constaté que les vents étaient légers et variables. Par moments, les vents n’étaient pas relevés sur le MFD de l’hélicoptère parce qu’ils étaient inférieurs au seuil de 5 nœudsNote de bas de page 67. De manière générale, cela correspond aux renseignements sur les vents qui étaient transmis aux pilotes par l’observateur météorologique de la TCF.
Grâce à diverses sources d’information provenant de l’aéronef de l’événement à l’étude, l’enquête a permis de déterminer que les vents étaient généralement légers et venant du nord-ouest au cours de l’approche finale à vue. Ils ne dépassaient pas les 6 nœuds et venaient généralement du 300°V à 330°V. Cela correspondait à un vent relatif venant d’environ 50° à 80° à droite pendant les étapes initiales de la tentative d’approche à vue. Cela correspond aux vents indiqués par l’observateur météorologique de la TCF environ 33 minutes avant l’événement à l’étude. L’enquête n’a révélé aucune indication que l’aéronef de l’événement à l’étude volait en vent arrière au cours de l’approche finale.
1.7.3 Conditions météorologiques à l’île de Sable
Au moment des faits à l’étude, les conditions météorologiques à l’île de Sable, située à 9 NM à l’est-nord-est de la TCF, comprenaient des vents légers (de 4 à 6 nœuds), généralement du sudNote de bas de page 68, avec une visibilité variant de 1 ½ SM à 1 ¾ SM dans de la faible pluie et de la brume, avec un couvert nuageux dont la base était située à 400 pieds AGL. Ces données correspondent à la prévision d’aérodrome (TAF) en vigueur au moment des faits, sauf que les vents étaient plus légers que ne l’indiquaient les prévisions.
1.8 Aides à la navigation
Sans objet.
1.9 Communications
Sans objet.
1.10 Renseignements sur l’aérodrome
Sans objet.
1.11 Enregistreurs de bord
1.11.1 Généralités
L’hélicoptère de l’événement à l’étude était doté de 2 enregistreurs de vol multifonctions (MPFR)Note de bas de page 69. Les MPFR consignent 25 heures de données d’enregistreur de données de vol (FDR) et 2 heures de son d’enregistreur de conversations de poste de pilotage (CVR) sur une mémoire à semi-conducteurs à l’épreuve des impacts. Après avoir consigné 25 heures de données FDR et 2 heures de son CVR, les MPFR écrasent les données et le son.
Les données du FDR couvrant la majeure partie de l’événement ont été extraites du MPFR. De plus, des données ont été récupérées à partir des ordinateurs gérant le système de surveillance des cycles de fonctionnement (HUMS) et des systèmes de gestion de vol (FMS).
NAV CANADA a fourni des données de suivi d’aéronef par l’entremise du réseau de surveillance dépendante automatique en mode diffusion satellitaire. Des données de suivi d’aéronef ont également été obtenues auprès du service de suivi de vol par satellite de l’aéronef. La combinaison des renseignements recueillis à partir de ces sources a fourni des détails importants sur le vol à l’étude et elle a joué un rôle déterminant dans l’enquête.
1.11.2 Perte de données de l’enregistreur de conversations de poste de pilotage sur l’événement
En raison de l’état APU GCU FAIL, les pilotes n’ont pas pu démarrer l’APU conformément à la procédure d’arrêt normale. Après un certain retard, l’arrêt a été effectué 23 minutes après l’atterrissage, 96 minutes après la descente inopinée. Un des pilotes, en collaboration avec un technicien, a coupé l’alimentation électrique du système en tirant sur les disjoncteurs CVR/FDRNote de bas de page 70. L’aéronef a été déplacé dans le hangar et une pancarte a été placée pour indiquer qu’il était mis en quarantaine.
Le lendemain, le fabricant a demandé à CHO de lui fournir les données des FDR et HUMS à des fins d’analyse. Cela devait être fait à distance par la compagnie propriétaire de l’hélicoptère de l’événement à l’étude. Un représentant de cette compagnie a informé le personnel de maintenance de CHO que l’alimentation électrique de l’hélicoptère devrait être rétablie pour effectuer les téléchargements requis. Le personnel de maintenance de CHO a remis en question ces instructions, par souci de conservation des données du CVR; toutefois, le représentant l’a assuré que seules les données des FDR et HUMS seraient téléchargées.
Les disjoncteurs ont été enfoncés et le téléchargement à distance des FDR et HUMS a été effectué. Le CVR a été sous tension durant 54 minutes pendant et après ce processus. Pendant ce temps, le CVR écrasait ses données, et toutes les données du CVR sur l’événement ont été perdues. Lorsque le BST a reçu les enregistreurs pour le téléchargement des donnéesNote de bas de page 71, les données audio du CVR commençaient environ 30 minutes après l’événement, alors que l’hélicoptère était en vol en palier, sur la trajectoire de retour du vol.
1.11.3 Exigences de conservation des données de l’enregistreur de conversations de poste de pilotage et de l’enregistreur de données de vol
Selon le paragraphe 8(1) du Règlement sur le Bureau de la sécurité des transports, « [t]oute personne qui exerce un contrôle sur un élément de preuve relatif à un accident de transport ou qui en a la possession le conserve jusqu’à ce que le Bureau l’en avise autrementNote de bas de page 72 ».
La circulaire d’information no 700-013 de Transports Canada, Procédures et formation pour la préservation des données enregistrées à bord d’un aéronef, stipule que « le manuel d’exploitation de la compagnie (COM) doit contenir les procédures relatives aux FDR et aux CVR. On s’attend à ce que les étapes appropriées à suivre pour désactiver un FDR et/ou un CVR à la suite d’un accident ou d’un incident soient comprises dans ces procéduresNote de bas de page 73 ». Cette exigence était abordée à la section 4.8 du COM de CHO, qui précise que [traduction] « pour empêcher de nouvelles données “non reliées à un événement” d’écraser les données d’un événement, il est essentiel que l’alimentation électrique ne soit pas rétablie dans l’hélicoptèreNote de bas de page 74 ».
Le COM décrivait les mesures que devaient prendre les pilotes et le personnel de maintenance pour conserver les données du CVR et du FDR après un événement. Par exemple, le COM indiquait qu’une entrée devait être faite [traduction] « dans le carnet de route "exigeant que les données soient téléchargées avant que l’alimentation électrique de l’aéronef soit rétablie", et l’installation du dispositif de verrouillage de la batterie approprié avant de quitter l’hélicoptèreNote de bas de page 75 ». Le COM indiquait également que les gestionnaires doivent s’assurer que l’hélicoptère n’est pas alimenté en électricité. Même si ces mesures de protection procédurales étaient en place, elles n’ont pas été exécutées, ce qui a rendu ces défenses inefficaces.
La circulaire d’information no 700-013 stipule également que le programme de formation d’un exploitant doit « inclure les procédures à suivre pour désactiver un FDR et/ou un CVR à la suite d’un accident ou d’un incident, et doit être fournie aux membres d’équipage de conduite et au personnel au solNote de bas de page 76 ». Les techniciens qui se sont occupés de l’hélicoptère après l’événement à l’étude n’avaient pas reçu de formation particulière sur la préservation des données du FDR et du CVR après un événement. De plus, ces membres du personnel ne connaissaient pas les exigences relatives à la préservation des renseignements sur les enregistreurs stipulées au paragraphe 8(1) du Règlement sur le Bureau de la sécurité des transports.
Le BST a déjà documenté de nombreux exemples où des données critiques du FDR ou du CVR n’étaient pas disponibles pour une enquête parce qu’elles n’avaient pas été protégées après un événement. L’enquête sur l’événement à l’étude a permis de révéler qu’entre janvier 2004 et mai 2020, il y a eu 59 enquêtes du BST où les données du CVR avaient été écrasées (annexe D)Note de bas de page 77. Parmi ces écrasements de données de CVR, 34 (58 %) ont été attribués à la mise sous tension de l’aéronef, ou sa remise sous tension, après l’atterrissage.
1.11.4 Enregistreur vidéo et vocal léger embarqué
Bien que la réglementation ne l’exige pas, l’aéronef de l’événement à l’étude était doté d’un dispositif d’enregistrement léger. Le dispositif est [traduction] « un système intégral léger de surveillance, d’enregistrement et de communication par satellite de prochaine génération qui fournit des renseignements d’aéronef vocaux, vidéo, analogiques et numériquesNote de bas de page 78 ». L’unité procure une boucle d’enregistrement continue d’au moins 30 heures, qui est stockée sur une carte mémoire Secure Digital. Elle enregistre des informations provenant d’un maximum de 3 caméras haute définition à protocole Internet et de 5 sources audio.
Le dispositif d’enregistrement léger de l’hélicoptère de l’événement à l’étude n’était pas en fonction au cours du vol à l’étude.
1.12 Renseignements sur l’épave et sur l’impact
Sans objet.
1.13 Renseignements médicaux et pathologiques
Selon l’enquête, rien ne porte à croire que des facteurs médicaux ou physiologiques aient pu nuire au rendement de l’équipage.
1.14 Incendie
Il n’y a pas eu d’incendie.
1.15 Questions relatives à la survie des occupants
Sans objet.
1.16 Essais et recherches
1.16.1 Rapports de laboratoire du BST
Le BST a produit les rapports de laboratoire suivants dans le cadre de la présente enquête :
- LP171/2019 – Flight data analysis [analyse des données de vol];
- LP172/2019 – CVR audio recovery [récupération des données audio du CVR];
- LP092/2020 – Helideck visibility angles [angles de visibilité de l’héliplateforme];
- LP105/2020 – EGPWS alerts [alertes de l’EGPWS].
1.17 Renseignements sur les organismes et sur la gestion
1.17.1 Généralités
CHO était une division d’Hélicoptères Canadiens Limitée (HCL). HCL exploite des bases dans de nombreuses villes au pays et à l’étranger. Le siège social de HCL est situé à Les Cèdres (Québec), et le bureau de la direction est situé à Edmonton (Alberta).
En 2015, CHO (qui faisait alors affaire sous le nom de Helicopters (New Zealand) Global sous HCL) a commencé à mener des activités à Halifax (Nouvelle-Écosse) pour fournir du transport extracôtier par hélicoptère à l’industrie pétrolière et gazière extracôtière. En 2018, la compagnie a commencé à faire affaire sous le nom commercial Canadian Helicopters Offshore. CHO a cessé ses activités en 2019, peu après l’événement.
CHO détenait des certificats d’exploitation pour les opérations effectuées en vertu de la sous-partie 702 (travaux aériens) et de la sous-partie 704 (service aérien de navette) du RAC. La compagnie effectuait des opérations de transport extracôtier de passagers, de MEDEVAC, de recherche et sauvetage (SAR) et de chargement externe (classe B). La compagnie effectuait environ 375 vols par année.
Au moment de l’événement à l’étude, CHO exploitait 2 Sikorsky S-92A à partir de CYHZ et employait 10 pilotes, 9 préposés à la maintenance, 16 préposés au soutien et 8 gestionnaires (pilotes, ingénieurs, sécurité et qualité, administration).
1.17.2 Contrôle opérationnel
CHO menait ses activités en utilisant un système de régulation des vols en coresponsabilité de type B, ce qui signifie que le pilote et le répartiteur de vol partageaient la responsabilité des [traduction] « décisions concernant le plan de vol exploitation avant l’acceptation du plan de vol exploitation par le commandant de bordNote de bas de page 79,Note de bas de page 80 ». Le répartiteur de vol préparait le plan de vol exploitation (OFP), qui était soumis à l’assentiment et l’approbation du commandant de bord.
1.17.3 Gestion de la sécurité chez Canadian Helicopters Offshore
CHO avait mis en œuvre un système de gestion de la sécurité à titre volontaire. Le système de gestion de la sécurité n’était pas exigé par la réglementation et n’était donc pas audité par TC.
1.17.4 Programme de suivi des données de vol des hélicoptères de Canadian Helicopters Offshore
CHO avait un programme de HFDM visant à cerner les domaines présentant un risque opérationnel et les mesures correctives ou préventives possibles, grâce à l’utilisation systématique et proactive des données de vol numériques provenant des activités courantes. Selon le manuel HFDM de CHO, le [traduction] « système de FDM [suivi des données de vol] permet à CHO de comparer les SOP aux pratiques réelles dans les vols de tous les joursNote de bas de page 81 ».
Le programme de HFDM de CHO comprenait des critères choisis qui faisaient l’objet d’un suivi, et les résultats étaient compilés et examinés mensuellement. Pour l’environnement extracôtier, les critères comprenaient un taux de descente dépassant les 550 pi/min (si l’aéronef se trouvait entre 0,1 NM et 0,4 NM de l’installation et sous la barre des 300 pieds), les assiettes en cabré de plus de 18° et une vitesse sol de plus de 70 nœuds sous la barre des 300 pieds. Le programme de HFDM ne surveillait pas la distance de l’installation, l’altitude avant la descente finale ou le respect de l’angle d’approche de 4,7° pour les approches à vue.
Un examen effectué par le BST des données de HFDM au cours des 4 mois précédant l’événement n’a révélé aucune tendance notable, selon les critères de HFDM extracôtier de CHO.
1.18 Renseignements supplémentaires
1.18.1 Performances de l’hélicoptère
1.18.1.1 Courbe de puissance
Dans le S-92A, la puissance est mesurée en termes de couple moteur. Selon les conditions, un réglage de couple donné sera nécessaire pour maintenir une altitude et une vitesse anémométrique données. À mesure qu’un hélicoptère accélère à partir d’un vol stationnaire, une augmentation de puissance initiale est nécessaire pour empêcher une descente verticale; toutefois, la puissance requise diminue ensuite jusqu’à ce que l’hélicoptère atteigne sa vitesse ascensionnelle optimale, ou vitesse d’autonomie maximale, (c.-à-d., sa vitesse de finesse vitesse de finesse maximale, ou « bucket speed » en anglais). Au-delà de ce point, la puissance nécessaire pour maintenir l’altitude ou pour monter augmentera en fonction de la traînée générée par le profil de fuselage. La courbe formée par le tracé de la vitesse anémométrique par rapport à la puissance (c.-à-d., le couple) nécessaire est appelée « courbe de puissance » (figure 11).
![Exemple de courbe de puissance d’hélicoptère (Source : Transports Canada, TP 9982, <em>Manuel de pilotage des hélicoptères</em>, 2<sup>e</sup> édition [juin 2006])](/sites/default/files/fra/rapports-reports/aviation/2019/a19a0055/images/a19a0055-figure-11.jpg)
À mesure que la vitesse anémométrique diminue sous la vitesse de finesse maximale, la traînée induite augmente. On appelle cette situation « voler sur l’arrière de la de la courbe de puissance ». Lorsqu’on vole sur « l’arrière de la courbe de puissance », une augmentation de la puissance est nécessaire pour maintenir la vitesse verticale (c.-à-d., pour maintenir un vol en palier ou le taux de descente ou de montée). Si la puissance n’est pas augmentée pour maintenir le taux de descente désiré, à mesure que la vitesse anémométrique diminue, un taux de descente excessif peut se manifester. Par conséquent, la gestion efficace de la puissance exige que les pilotes continuent d’effectuer des contre-vérifications pour s’assurer que la puissance commandée satisfait aux exigences de ce régime de volNote de bas de page 82.
Peu après l’événement, le fabricant a effectué des calculs de performances et le BST les a vérifiés. Selon le tableau des performances de croisière dans le RFM du S-92A, au poids de l’hélicoptèreNote de bas de page 83 et dans les conditions environnementales au moment de l’événement, un réglage du couple moteur de 48 % aurait été nécessaire pour maintenir l’altitude à 60 KIAS à l’étape finale de l’approche à vue. Une descente à 500 pi/min (taux de descente maximal selon les critères d’approche stabilisée) à 60 KIAS nécessiterait une réduction du réglage du couple moteur à 39 % (annexe E)Note de bas de page 84. Cependant, comme la vitesse anémométrique continue de diminuer en approche finale (c.-à-d. qu’on se déplace plus loin sur le côté arrière de la courbe de puissance), davantage de couple serait requis à mesure que l’hélicoptère ralentit pour maintenir un taux de descente constant (c.-à-d., d’un maximum de 500 pi/min). Par conséquent, le couple moteur de 27 % utilisé lors de l’événement à l’étude était considérablement inférieur à la puissance minimale requise pour rester sous le taux de descente maximal de 500 pi/min au cours de l’approche finale.
L’enquête a permis de déterminer que les pilotes n’avaient pas conscience du réglage du couple (27 %) au cours de la descente finale, avant d’entrer dans le banc de brouillard.
1.18.1.2 Effets du surcouple
Dans certaines situations d’urgence, il arrive que le pilote doive dépasser les limites d’exploitation de l’aéronef. Pour cette raison, les fabricants prévoient souvent des dépassements transitoires, spécialement en cas d’urgence. Dans le cas du S-92A, la limite pour un couple transitoire des 2 moteurs est de 100 % à 120 % durant 10 secondes. Dans l’événement à l’étude, le couple moteur a atteint une valeur de 146 %; il a été pendant 44 secondes au-dessus de 100 %, et pendant 14 secondes au-dessus de 120 %.
Les valeurs de couple ont déclenché le voyant d’avertissement « LIMIT EXCEED » [limite dépassée], qui vise à avertir le pilote que la boîte de transmission fonctionne ou a fonctionné en dehors de la plage de couple prévue. Si tous les moteurs fonctionnent, le voyant d’avertissement « LIMIT EXCEED » est déclenché lorsque le couple dépasse 121 % durant 10 secondes ou lorsqu’il est supérieur à 140 %Note de bas de page 85.
L’aéronef est conçu pour fonctionner normalement tant qu’il est maintenu dans ses limites d‘exploitation. Une augmentation rapide du collectif entraîne une baisse du Nr et peut causer un grave surcouple, ce qui peut endommager des composants de l’aéronef (p. ex., le groupe motopropulseur, y compris les boîtes de transmission principale, intermédiaire et du rotor de queue). Comme le rotor de queue est raccordé au rotor principal, toute baisse du Nr aura un effet proportionnel sur le rotor de queueNote de bas de page 86. Par conséquent, une réduction du Nr entraînera une réduction de la poussée du rotor de queue et nécessitera une forte sollicitation du palonnier pour maintenir le cap. Si la baisse du Nr et la réduction subséquente de la poussée du rotor de queue continuent, le contrôle directionnel devient difficile et peut éventuellement devenir impossible. Dans un S-92A, une perte de poussée du rotor de queue entraînera un lacet de l’hélicoptère vers la droite autour de son axe vertical.
1.18.1.3 Anneau tourbillonnaire
Les hélicoptères sont vulnérables à un phénomène aérodynamique appelé anneau tourbillonnaire (VRS). Un VRS se produit lorsque la trajectoire de vol, la vitesse anémométrique et le taux de descente d’un hélicoptère coïncident avec la déflexion de l’air vers le bas de l’hélicoptèreNote de bas de page 87. En vol normal, l’écoulement d’air du rotor principal est dirigé vers le bas. En VRS, les tourbillons d’extrémité générés par le rotor principal recirculent à travers le rotor, ce qui nuit à la portance (figure 12). L’augmentation de la puissance (augmentation du pas collectif) a pour effet d’accélérer encore plus la déflexion de l’air vers le bas à travers le rotor principal, ce qui aggrave la situation. Dans un anneau tourbillonnaire intégral, l’hélicoptère peut subir des oscillations intempestives en tangage et en roulis, et le taux de descente peut approcher les 6000 pi/min si on le laisse prendre de l’ampleurNote de bas de page 88.
![Écoulement de l’air dans un anneau tourbillonnaire (Source : J. Drees et W.P. Hendal, « Airflow Patterns in the Neighbourhood of Helicopter Rotors », <em>Aircraft Engineering</em>, vol. 23, no 266 [avril 1951])](/sites/default/files/fra/rapports-reports/aviation/2019/a19a0055/images/a19a0055-figure-12.jpg)
Le Helicopter Flying HandbookNote de bas de page 89, publié par la Federal Aviation Administration (FAA) des États-Unis, indique que la combinaison des conditions suivantes est susceptible d’entraîner un VRS :
- une descente verticale ou presque verticale à une vitesse d’au moins 300 pi/min;
- un vol propulsé, généralement dans la plage de couple moteur de 20 à 100 %;
- une vitesse horizontale plus lente que la portance nette de translationNote de bas de page 90.
Afin de réduire le risque d’entrer en VRS, les pilotes d’hélicoptère sont formés pour éviter de faire pénétrer leur hélicoptère dans sa propre déflexion de l’air. Si les pilotes d’hélicoptère à rotor principal simple se retrouvent dans un VRS, TC recommande les 2 méthodes de rétablissement suivantes :
- Le piqué de redressement – Le pilote doit pousser le cyclique vers l’avant tout en réduisant le collectif afin d’essayer de gagner de la vitesse anémométrique. À mesure que la vitesse anémométrique augmente, l’hélicoptère sort de sa déflexion vers le bas et le vol normal peut reprendre.
- La mise en autorotation – Cette procédure entraîne un changement dans l’écoulement de l’air, le faisant passer de l’écoulement perturbé dû au VRS à l’écoulement vers le haut de l’autorotation. Le pilote peut alors pousser lentement le cyclique vers l’avant, prendre de la vitesse et augmenter la puissance afin de reprendre le vol normalNote de bas de page 91.
Ces dernières années, une nouvelle technique de rétablissement, la méthode Vuichard, a gagné en popularité. Cette technique recourt à [traduction] « une poussée cyclique latérale combinée à une augmentation de la puissance et une poussée anticouple latérale [...] pour éliminer le taux de descente plutôt que sortir de l’anneau tourbillonnaireNote de bas de page 92 ».
Généralement, un hélicoptère en VRS subira une perte considérable d’altitude avant de pouvoir reprendre un vol normal. Si l’altitude initiale est insuffisante, l’hélicoptère peut entrer en collision avec le relief avant de parvenir à se rétablir d’un VRS.
Les données du vol à l’étude ont été analysées afin de déterminer si un VRS a pu être un facteur à un moment donné pendant la descente abrupte. Étant donné que le phénomène englobe des effets aérodynamiques complexes qui sont très variables, il n’y a pas de limite précise quant au VRS et à la gravité de ses divers symptômes. Il existe diverses estimations théoriques et empiriques concernant les limites des VRSNote de bas de page 93. Ces limites sont généralement exprimées en termes de taux de descente, de vitesse anémométrique et/ou de poussée du rotor principal. Bien que les limites extrêmes varient entre eux, de manière générale, tous les modèles s’accordent.
Les données sur l’événement indiquent que l’aéronef a subi les effets d’un VRS pendant au moins 5 secondes et peut-être jusqu’à 9 secondes au cours de la descente abrupte (environ entre 280 pieds RADALT et 70 pieds RADALT). En particulier, le taux de descente a augmenté jusqu’à 1800 pi/min en même temps que le couple moteur passait de 55 % à 105 % , et que des mouvements de tangage et de roulis simultanés se produisaient. Quand le couple moteur était à 105 % (pendant environ 4 secondes, de 180 pieds à 75 pieds RADALT), le taux de descente a baissé jusqu’à 1100 pi/min. Une nouvelle augmentation du couple à 140 % a réduit le taux de descente à moins de 500 pi/min.
L’hélicoptère est sorti du VRS alors qu’il gagnait de la vitesse anémométrique lorsqu’il a glissé vers la droite. En l’occurrence, l’importante augmentation de puissance a aidé l’hélicoptère à sortir du VRS.
1.18.2 Environnement visuel dégradé
1.18.2.1 Généralités
Un environnement visuel dégradé est défini comme étant [traduction] « une visibilité réduite à un degré potentiellement variable, dans laquelle la conscience situationnelle et la maîtrise de l’aéronef ne peuvent être maintenues d’une manière aussi complète qu’elles le seraient dans des conditions météorologiques de vol à vue (VMC) et peuvent être perduesNote de bas de page 94 ». Un large éventail de situations peut engendrer ce phénomène. Par exemple, un environnement visuel dégradé peut se manifester lorsque l’aéronef est piloté de nuit avec ou sans assistanceNote de bas de page 95 ou dans les nuages, la pluie, la brume, le brouillard, la neige ou encore la neige ou le sable en recirculation. Il peut également se manifester au-dessus de l’eau lorsque de telles conditions limitent, réduisent ou détériorent les repères visuels dont le pilote a besoin (voir l’annexe F).
1.18.2.2 Importance des repères visuels dans le vol à vue en contexte extracôtier
La vision est de loin la plus importante source de repères pour l’orientation spatiale. Dans un vol VFR, l’environnement visuel est le principal élément permettant au pilote d’hélicoptère d’assurer une maîtrise et une stabilisation précises. En particulier, la capacité de voir les points de repère au sol, le ciel et l’horizon (la ligne qui se forme au point de rencontre entre le ciel et la terre) fournit à un pilote une rétroaction claire et immédiate sur les mouvements angulaires et de translationNote de bas de page 96. Dans l’environnement extracôtier, même avec un horizon discernable, le manque de points de repères au sol (p. ex. de l’herbe, des arbres, des bâtiments) peut rendre difficile de déterminer l’altitude, la vitesse et le mouvement latéral.
Parce que les repères visuels sont limités dans l’environnement extracôtier, les pilotes se fient généralement à 4 principaux éléments de référence pour maintenir une ligne de visée, ou angle d’approche, et un taux de rapprochement corrects :
- Horizon : La principale référence, dans des manœuvres de vol à vue, pour discerner l’assiette en tangage et l’angle d’inclinaison.
- Vagues à la surface :
- La hauteur des vagues et l’écart entre elles aident à évaluer l’altitude (p. ex., des vagues moins espacées et moins élevées donnent l’impression que l’eau se trouve plus loin).
- La vitesse et la direction du vent peuvent être estimées en observant la configuration, la taille et le mouvement des vagues.
- Structure d’une plateforme extracôtière et obstacles connexes :
- Les parties de la structure de la plateforme et les obstacles connexes alignés dans le champ visuel (horizontalement ou verticalement) peuvent fournir des informations sur la profondeur, la distance et l’angle de descente (voir l’annexe G). Par exemple, si un obstacle derrière l’héliplateforme commence à apparaître plus haut dans le pare-brise par rapport à l’héliplateforme à mesure que celle-ci prend de l’ampleur dans le champ de vision du pilote, il fournit des renseignements sur le taux de rapprochement et indique que l’hélicoptère descend.
- La taille ou la profondeur relatives de la structure et des obstacles fournisent des indices visuels de la distance de la plateforme extracôtière et de l’altitude. À mesure qu’un hélicoptère descend en approche, la taille et la profondeur perçues de l’héliplateforme et des obstacles environnants devraient augmenter à une vitesse anticipée dans le champ de vision du pilote.
- Héliplateforme : L’aspect de l’héliplateforme fournit des indices relatifs à l’assiette, à la distance et à l’altitude, notamment :
- le fait que l’héliplateforme (qui comprend le cercle jaune avec la lettre « H » au milieu) apparaît à un point constant sur le pare-brise;
- l’angle obliqueNote de bas de page 97 perçu de l’héliplateforme ou l’apparence ovale du cercle jaune par rapport à l’horizon et aux obstacles environnants;
- la taille ou la profondeur perçues de l’héliplateforme par rapport à l’horizon et aux obstacles environnants.
Le flux optiqueNote de bas de page 98 est un signal de mouvement qui permet d’estimer l’altitude-sol, la vitesse et le taux de rapprochement. Lorsqu’on se déplace en ligne droite, les yeux fixés sur le cap, le mouvement relatif des repères extracôtiers engendre un flux radial d’images sur les rétines. Les objets les plus rapprochés se déplacent plus rapidement dans le champ de flux optique par rapport aux vitesses angulaires relativement lentes des objets plus éloignés et de la surface de l’eauNote de bas de page 99,Note de bas de page 100.
Au cours d’une approche, le pilote manœuvre l’hélicoptère de sorte que le point de visée reste constant dans son champ de vision une fois que l’angle d’approche correct a été établi. [Traduction] « Le déplacement du point de visée à l’intérieur du flux optique du champ de vision du pilote fournit des informations sur la direction verticale et latérale de tout écart de l’aéronef par rapport à sa cibleNote de bas de page 101. » Le mouvement des vagues à la surface de l’eau sous l’aéronef, dans le champ de vision périphérique du pilote, peut donner une indication de la vitesse et de l’altitude, en particulier à la lumière de l’altitude RADALT ou de l’altimètre.
Pour démontrer le rôle des repères visuels dans l’environnement extracôtier, le BST a créé des représentations à l’aide d’un logiciel de modélisation visuelle. Les représentations, créées d’après les données de l’événement à l’étude et l’angle d’approche des SOP, montrent à quoi l’environnement visuel aurait pu ressembler à une distance de 0,4 NM de la TCF, dans un DVE (annexe F) et dans des conditions de bonne visibilité (annexe G). Les conditions de bonne visibilité comportent un plus grand nombre de repères permettant d’évaluer l’altitude, la vitesse ou le taux de rapprochement, l’assiette en tangage et l’angle d’inclinaison. De telles conditions peuvent aider à la surveillance verticale et latérale de la trajectoire de vol. Par exemple, avec l’expérience acquise, les pilotes apprennent à reconnaître la façon dont les repères (comme le sommet de la tour de torche par rapport à l’horizon) devraient normalement apparaître, ou la vitesse à laquelle ils devraient sembler se déplacer vers le haut pendant l’approche. Cette capacité aide à détecter rapidement les écarts. De même, l’alignement des structures de support (comme les colonnes de la plateforme) fournit des renseignements importants sur la trajectoire de l’hélicoptère dans l’approche finale. En revanche, il ressort clairement des représentations de DVE que beaucoup moins de repères visuels sont disponibles dans une telle situation pour aider à orienter verticalement et latéralement l’approche finale.
1.18.2.3 Orientation spatiale dans des conditions de visibilité réduite
Les humains supposent souvent à tort qu’il est facile de déceler des changementsNote de bas de page 102. Des recherches ont démontré que la précision du jugement du pilote est réduite dans un DVENote de bas de page 103. Lorsque le relief est caché par certains phénomènes, comme le brouillard, les pilotes peuvent éprouver des difficultés à évaluer la hauteur, la vitesse et la distance en raison de l’absence de caractéristiques du relief et de la réduction du flux optique. De même, sans points de repère additionnels comme l’horizon ou d’autres structures entourant l’héliplateforme (c.-à-d. des repères visuels périphériques), l’évaluation de l’assiette et de la hauteur par un pilote peut également être moins précise, et les écarts verticaux ou latéraux peuvent passer inaperçus, augmentant ainsi le risque de désorientation spatialeNote de bas de page 104.
Si l’image de visée de l’héliplateforme est le seul point de repère visuel externe, les pilotes peuvent faire une fixation sur elle. Toutefois, si les pilotes font une fixation sur les repères extérieurs, [traduction] :
... les changements sur les instruments peuvent ne pas être remarqués. Ces changements non perçus peuvent amener un pilote à croire que sa connaissance de sa position et de sa trajectoire dans l’espace est exacte. Cette conviction mène à une recherche amoindrie de nouvelles informations ou d’informations indiquant le contraireNote de bas de page 105.
Pour cette raison, les pilotes doivent tirer des informations d’orientation d’autres repères, comme les instruments de vol, lorsqu’ils pilotent dans un DVE.
À mesure que les repères visuels externes diminuent, la charge de travail augmente et les pilotes doivent compter de plus en plus sur leurs instruments de vol ou sur les systèmes de stabilité, et confirmer les manœuvres visuelles par contre-vérification des instruments de vol afin d’assurer l’exactitude de la perception visuelleNote de bas de page 106,Note de bas de page 107.
En ce qui a trait aux vols dans des DVE, les SOP de CHO mettaient en garde contre les risques associés à des approches dans des conditions de « trou noirNote de bas de page 108 ». En particulier, les SOP avertissaient les pilotes de ne pas faire une fixation sur l’éclairage et de reconnaître que l’absence de repères périphériques rendait difficile l’évaluation de la trajectoire de descenteNote de bas de page 109. Les SOP de CHO ne faisaient pas état de préoccupations semblables concernant les approches extracôtières à vue menées dans un DVE.
1.18.2.4 Stratégies technologiques d’atténuation des risques dans un environnement visuel dégradé
Au cours des dernières années, de nombreuses solutions technologiques ont été mises au point pour réduire les risques associés aux vols dans des DVE. Une des solutions les plus populaires est le recours à des systèmes d’accroissement de la vision, qui comprennent les technologies suivantes :
- les systèmes de vision artificielle qui s’appuient sur les informations GPS et une base de données pour créer une représentation virtuelle du monde extérieur sur un affichage à bord de l’aéronef;
- les systèmes d’accroissement de la vision qui utilisent des capteurs embarqués (caméras dans le proche infrarouge ou radar à ondes millimétriques) pour offrir au pilote une meilleure vue du monde extérieur;
- les systèmes de vision de vol améliorée (EFVS) qui combinent les renseignements de vol, la symbologie, le guidage de navigation et une image en temps réel du monde extérieur, puis présentent le tout au pilote à l’aide d’un affichage tête haute, d’un visuel de casque ou d’un dispositif équivalentNote de bas de page 110. La figure 13 présente un EFVS qui comprend des informations sur le relief, l’horizon et les instruments de vol. La figure 14 présente l’affichage d’un tunnel aérien sur un visuel de casque, qui comprend une trajectoire de descente de 3° représentée par des boîtes rectangulaires menant vers l’héliplateforme (en rouge), un horizon et des informations sur les instruments de vol.
![Système de vision de vol améliorée (Source : Federal Aviation Administration des États-Unis, Enhanced Flight Vision Systems, https://www.faa.gov/about/office_org/headquarters_offices/avs/offices/afx/afs/afs400/afs410/efvs/media/EFVS_Overview.pdf [dernière consultation : le 3 août 2020])](/sites/default/files/fra/rapports-reports/aviation/2019/a19a0055/images/a19a0055-figure-13.jpg)
![Tunnel aérien sur un visuel de casque. Les boîtes rectangulaires indiquent une trajectoire de descente de 3°; la ligne rouge indique l’héliplateforme. (Source : National Aerospace Laboratory, Improving Offshore Helicopter Operability & Safety [NLR-TP-2014-518], février 2015.)](/sites/default/files/fra/rapports-reports/aviation/2019/a19a0055/images/a19a0055-figure-14.jpg)
Un autre domaine de recherche envisagé pour atténuer les risques associés aux DVE est l’utilisation de systèmes d’avertissement auditif et tactile. Dans une étude de Recherche et développement pour la défense Canada, des repères tactiles en l’absence de repères auditifs et visuels ont accru la conscience situationnelle et limité les erreurs commises dans les axes de roulis, de tangage et de pilonnement. Cette approche fait appel au plus grand organe du corps (c.-à-d., la peau), qui est truffé de capteurs sensoriels, pour fournir une rétroaction continue au système nerveux centralNote de bas de page 111.
Certains fabricants d’hélicoptères utilisés dans un contexte extracôtier ont mis au point des modes d’approche automatisée des plateformes. Ces modes visent tout particulièrement à renforcer la sécurité dans un DVE ou dans des IMC. Le système d’approche de plateforme optionnel du S-92A mis au point par Sikorsky permet d’effectuer une approche par GPS entièrement couplée et automatisée vers une installation extracôtière dans des IMC. Le système d’approche de la plateforme est conçu pour positionner l’aéronef sur une trajectoire déterminée, à une vitesse sol de 30 nœuds, dans une position qui est décalée sur le côté de l’héliplateforme et à 50 pieds au-dessus. Le pilote saisit les renseignements d’approche dans le FMS, et le calculateur de commandes de vol dirige l’approche. Le système d’approche de plateforme peut être adapté aux aéronefs existants, et il a été homologué par plusieurs organismes de réglementation, dont TC, la FAA et l’Agence européenne de la sécurité aérienne. À l’heure actuelle, aucun S-92A exploité au Canada n’est doté de ce système d’approche de plateforme.
D’autres fabricants d’hélicoptères ont créé leur propre système d’approche d’installations extracôtières semblable au système d’approche de plateformes de Sikorsky, qui permet d’effectuer une approche entièrement automatisée jusqu’au point de décision de remise des gaz et qui aide à l’atterrissage final sur la plateforme. Au moment de la rédaction du présent rapport, aucun autre système automatisé d’approche vers des installations extracôtières n’était homologué au Canada.
1.18.3 Procédures d’utilisation normalisées
1.18.3.1 Généralités
CHO disposait de SOP qui abordaient un large éventail de sujets, allant des procédures générales liées à la CRM à des procédures opérationnelles détaillées. Les SOP [traduction] « permettent aux membres d’équipage de s’acquitter de leurs fonctions de façon prévisible et normalisée. Cela permet aux membres d’équipage de déceler rapidement tout écart par rapport aux profils et aux procédures normauxNote de bas de page 112 ». Le COM indiquait que les dérogations aux SOP n’étaient pas autorisées, à moins que le commandant de bord [traduction] « détermine que la sécurité du vol pourrait être compromiseNote de bas de page 113 ».
1.18.3.2 Poste de pilotage stérile
CHO avait une politique de poste de pilotage stérile exigeant des pilotes qu’ils s’abstiennent de se livrer à des activités non essentielles pendant les phases de vol critiques ou pendant toute tâche opérationnelle. La procédure de poste de pilotage stérile de CHO indiquait que [traduction] « le PM surveille activement le profil de volNote de bas de page 114 ».
L’enquête a permis de déterminer que les pilotes de la compagnie ont interprété ces indications comme signifiant que les renseignements sur le cap, l’altitude, la vitesse anémométrique ou le couple ne devaient pas être communiqués par le PM à moins qu’il n’y ait un quelconque écart imprévu, ou si le PF le demandait expressément.
1.18.3.3 Transfert de contrôle
CHO utilisait les annonces verbales normalisées généralement acceptées « I have control » [j’ai le contrôle] et « you have control » [vous avez le contrôle], selon lequel des pilotes initiait un transfert de contrôle. L’objectif était d’éviter toute confusion quant à savoir quel pilote était le PF et quel pilote était le PMNote de bas de page 115.
1.18.3.4 Annonces normalisées
Afin d’améliorer l’efficacité de l’équipage, CHO avait établi des annonces normalisées pour diverses situations précises. L’enquête a permis de révéler certaines différences dans les critères indiqués pour annoncer le taux de descente. En particulier, différentes sections des SOP de CHO donnaient comme critère pour une annonce de taux de descente soit 500 pieds, soit 600 pieds.
Pour les approches extracôtières à vue, les SOP établissaient que tout taux de descente supérieur à 500 pi/min était un taux de descente anormalNote de bas de page 116. Selon les SOP, si ce taux était atteint, le PM devait annoncer « check descent rate » [contrôle du taux de descente], et le PF devait répondre « correcting » [correction], à moins que le taux de descente ne soit nécessaire, auquel cas le PF devait annoncer « intentional » [intentionnel], et le vol se poursuivaitNote de bas de page 117.
Les SOP de CHO ne définissaient pas précisément « abnormal pitch attitude » [assiette de tangage anormale] (en cabré ou en piqué); toutefois, elles indiquaient que la responsabilité du PM était de surveiller la trajectoire de vol et d’utiliser des annonces normalisées pour avertir le PF des éléments suivants :
- vitesse anémométrique supérieure ou inférieure de 5 nœuds par rapport à la cible;
- taux de descente supérieur à 600 pi/min;
- assiette en cabré supérieure à 15°Note de bas de page 118.
Les SOP de CHO présentaient un exemple d’échange de communication lorsque l’équipage de conduite obtenait un premier contact visuel avec la plateforme au cours d’une procédure Offshore/ARA vers une héliplateforme surélevée (figure 15). Toutefois, les SOP n’apportaient aucune explication quant à la mise en application de cette procédure ou aux différences en cas d’approche aux instruments ou d’approche à vue. Par exemple, on ne sait pas si l’échange décrit ci-dessous aurait lieu une fois le contact visuel acquis dans une procédure Offshore/ARA, ou s’il était également de mise pour une approche à vue. Dans le cas de l’approche à vue, l’équipage de conduite aurait un contact visuel avec l’héliplateforme pendant toute l’approche finale, et peut-être à partir d’une distance beaucoup plus grande. Selon la compagnie, les pilotes étaient censés faire preuve de bon sens lorsqu’ils lançaient les annonces décrites à la figure 15.
![Procédure d’approche et d’atterrissage de Canadian Helicopters Offshore vers une héliplateforme surélevée (Source : Canadian Helicopters Offshore, <em>Sikorsky S-92A Standard Operating Procedures for 704 Commuter and 702 Aerial Work</em>, no 4.0 [1<sup>er</sup> mai 2019], section 9.8, tableau 9-1, traduction par le BST)](/sites/default/files/fra/rapports-reports/aviation/2019/a19a0055/images/a19a0055-figure-15.jpg)
Remarque : FPF = pilote aux commandes; OEI = 1 moteur inopérant
Selon la procédure d’approche surveillée par le pilote de CHONote de bas de page 119, après le transfert de contrôle, [traduction] « le nouveau PM doit commencer à annoncer la vitesse sol, l’assiette en tangage et l’altitude radar pour aider le pilote responsable de l’atterrissage jusqu’à ce que l’annonce “landing” [atterrissage] soit lancéeNote de bas de page 120 ». Cela permettrait au PF de se concentrer sur l’extérieur et de réduire la quantité de contre-vérifications avec les instruments de vol pendant les dernières étapes de l’approche d’atterrissage. Pendant une approche extracôtière à vue, les SOP ne comportaient aucune exigence que les pilotes lancent des annonces de progression prédéterminées ou spontanées, après l’annonce initiale effectuée une fois le contact visuel établi avec l’installation.
L’enquête a permis de déterminer que certains pilotes d’hélicoptères militaires et civils demandent ou lancent ce genre d’annonces de progression, souvent appelées « patter ,» en anglais, au cours de séquences de pilotage manuel dans des conditions de charge de travail accrue des pilotes. Dans le cadre d’opérations militaires, cette pratique se voit souvent la nuit pendant les vols assistés à basse altitude, ou à chaque fois que le PF doit se concentrer sur des repères externes et qu’il n’a pas le temps de regarder à l’intérieur de l’aéronef. Cela réduit le temps que le PF doit consacrer à la contre-vérification des instruments de vol et aide à confirmer que les pilotes (et les autres membres d’équipage) disposent d’un modèle mental commun. Même si les annonces de progression peuvent encore être considérées comme appropriées dans certaines circonstances, depuis quelques années, elles sont de moins en moins utilisées dans les opérations d’hélicoptère extracôtières. Cette question sera examinée plus en détail à la section 1.18.4.
1.18.3.5 Assiettes anormales
Les SOP de CHO expliquaient qu’une assiette anormale pouvait être engendrée par un certain nombre de facteurs différents et qu’elle pouvait se manifester soudainement et sans signe avant-coureur. Les SOP font cette mise en garde [traduction] : « Il est assez courant que le PF, au cours d’un événement, fasse une fixation sur un aspect particulier et ne comprenne pas que beaucoup plus de choses se produisent ou que plus de mesures sont nécessaires pour corriger l’écartNote de bas de page 121. »
Les SOP comprenaient la procédure de base suivante pour se rétablir d’une assiette anormale :
- accepter que l’aéronef ne se comporte pas comme prévu, rechercher la cause ultérieurement;
- aligner le nez sur l’horizon;
- mettre les ailes à l’horizontale;
- utiliser au moins 80 % [couple];
- accélérer à un minimum de Vy [vitesse anémométrique ascensionnelle optimale, 80 KIAS];
- monter à 1000 pieds ou à la MOCA [altitude minimale de franchissement d’obstacles] avant d’essayer de stabiliser l’aéronef ou de rechercher la cause du problèmeNote de bas de page 122.
Les SOP indiquaient que le PM doit annoncer toute déviation. Si le PF n’accuse pas réception de l’annonce, ou s’il en accuse réception, mais ne prend pas de moyen physique pour corriger l’assiette, le PM doit considérer que le PF est frappé d’incapacité. Si le changement nécessaire ne se produit pas, le PM doit soit lancer l’annonce avec plus d’insistance (en utilisant la « règle des 2 communications » de CHO), soit présumer que le PF est frappé d’incapacité et prendre les commandes. Selon la règle des 2 communications de CHO, [traduction] :
un membre de l’équipage de conduite doit soupçonner un état d’incapacité chaque fois qu’un autre membre d’équipage ne répond pas adéquatement à une deuxième communication verbale associée à un écart important par rapport à une procédure d’utilisation normalisée ou à un profil de volNote de bas de page 123 .
L’enquête a permis de déterminer que des exercices de sortie d’assiette anormale faisaient partie de la formation initiale et périodique sur simulateur de vol de S-92A. Habituellement, le pilote devait se rétablir d’une situation inattendue où l’aéronef avait été placé dans une assiette anormale, soit en raison d’une incapacité du pilote, soit en raison d’une mauvaise manœuvre.
1.18.3.6 Incapacité du pilote et désorientation spatiale
La désorientation, ou désorientation spatiale, est un type d’incapacité où le cerveau du pilote interprète mal des indices de l’environnement concernant l’assiette de l’hélicoptère. L’apparition d’une désorientation spatiale peut être soit graduelle soit soudaine, et elle [traduction] « peut être très subtile et peut se manifester sous forme de “vision tubulaire” ou simplement de surcharge générale et de conscience limitée de la situationNote de bas de page 124 ». Les SOP avertissaient que l’incapacité peut être difficile à déceler, particulièrement pendant les phases de vol critiques dans un environnement de poste de pilotage stérileNote de bas de page 125.
Les SOP de CHO indiquaient que la désorientation est considérée comme un risque pendant les opérations de SAR en mer, de jour ou de nuit, en raison de l’absence de repères visuels. Les SOP ne désignaient pas d’autres opérations en mer comme présentant un risque accru en raison d’un manque de repères visuels.
En raison de la nature physiologique de la désorientation spatiale, il peut être très difficile pour les pilotes de la reconnaître, surtout pendant les périodes de charge de travail élevée, où toute l’attention est concentrée sur un seul repère ou sur un nombre très limité de repères. Grâce à une instruction, une formation et une coordination de l’équipage adéquates, les pilotes peuvent apprendre à reconnaître la désorientation spatiale et à utiliser les forces de contrôle appropriées pour rétablir l’aéronef et survivre à un incident causé par la désorientationNote de bas de page 126.
1.18.3.8 Approches stabilisées
Une approche stabilisée est une approche, soit aux instruments ou à vue, qui satisfait à certaines conditions fixées par l’exploitant. Les approches stabilisées permettent de libérer du temps et de l’attention qui peuvent être consacrés à des tâches critiques, comme la surveillance de la trajectoire de vol et de l’énergie, et elles définissent des limites d’écart et des hauteurs minimales pour aider à prendre les décisions sur l’atterrissage ou la remise des gazNote de bas de page 127. Selon TC, les critères d’approche stabilisée devraient comprendre : la vitesse, le réglage de la puissance, l’assiette, la configuration, les déviations d’altitude, le taux de descente et l’exécution des listes de vérification et des exposésNote de bas de page 128. Les lignes directrices de TC précisent également que la vitesse anémométrique, la vitesse verticale de descente et l’état énergétique devraient être surveillés de près au cours d’approches à vue et aux instruments.
Chez CHO, l’approche stabilisée était définie comme suit [traduction] :
- Établi sur la trajectoire du radiophare d’alignement ou d’arrivée, sans écart (+/– un point, +/
- [sic]– 10° de la trajectoire souhaitée) et seuls de petits changements de cap sont nécessaires pour maintenir la trajectoire.
- Établi sur la trajectoire de descente (s’il y a lieu), sans écart (+/– un point) ou à au plus 300 pieds au-dessus de l’altitude minimale du FAF/FAWP [repère d’approche finale / point de cheminement d’approche finale] et seuls de petits changements de puissance sont nécessaires pour maintenir la trajectoire de descente.
- Maintien de la vitesse d’approche déterminée dans une plage entre –5 KIAS et +10 KIAS [...].
- Aucun taux de descente anormal (taux de descente maximal de 500 pi/min, à moins qu’un taux plus élevé ait été prévu).
- L’aéronef est en bonne configuration d’atterrissage et tous les exposés et listes de vérification ont été exécutés.
- Des procédures d’approche uniques ou des conditions anormales exigeant un écart par rapport aux paramètres susmentionnés nécessitent un exposé spécialNote de bas de page 129.
Contrairement à ceux de certains exploitants, les critères d’approche stabilisée de CHO n’incluaient pas d’assiettes en cabré ou en piqué officielles dans des VMC ou des IMC. De plus, les critères d’approche stabilisée de CHO ne tenaient pas compte de l’état énergétique, puisqu’il n’est pas fait mention des paramètres de puissance minimale (c.-à-d., le couple moteur) à l’approche.
Le tableau 4 indique les altitudes d’approche stabilisée de CHO, tant pour les VMC que les IMC.
| Conditions de vol | Configuration pour l’atterrissage et stabilisation requises à : | Stabilisation requise à : |
|---|---|---|
IMC |
1000 pieds au-dessus de l’altitude d’atterrissage. |
500 pieds au-dessus de l’altitude d’atterrissage. |
VMC |
500 pieds au-dessus de l’altitude d’atterrissage. |
300 pieds au-dessus de l’altitude d’atterrissage. |
En plus du tableau 4, les SOP de CHO indiquaient qu’une approche qui n’est pas stabilisée [traduction] « à 250 pieds au-dessus de l’altitude d’atterrissage en VMC nécessite une remise des gaz immédiateNote de bas de page 130 ». Selon CHO, l’exigence de 250 pieds s’appliquait lors de la transition à vue d’une procédure Offshore/ARA et lorsque des repères visuels étaient acquis sous les 300 pieds au-dessus de l’altitude d’atterrissage. Ce contexte supplémentaire ne faisait pas partie des SOP de CHO; il était plutôt transmis aux pilotes de la compagnie pendant leur entraînement en ligne.
Selon les SOP, si l’hélicoptère n’était pas stabilisé à l’altitude seuil applicable du tableau 4 , il fallait procéder immédiatement à une remise des gaz. Toutefois, les pilotes de CHO n’étaient pas tenus, comme le recommande TC, de confirmer et d’énoncer avec certitude que les critères d’approche stabilisée avaient été respectés afin de poursuivre le vol sous l’altitude seuilNote de bas de page 131.
Selon les critères d’approche stabilisée de CHO, dans le cas d’un hélicoptère effectuant une approche à vue de jour vers la TCF, l’hélicoptère devait être configuré à 675 pieds RADALT et stabilisé à 475 pieds RADALT. Dans l’événement à l’étude, l’approche à vue a commencé à 500 pieds RADALT. Six secondes après le début de la descente, l’hélicoptère se trouvait à 300 pieds au-dessus de l’altitude d’atterrissage. Le taux de descente était de 520 pi/min et augmentait, jusqu’à atteindre un maximum de 1800 pi/min. Selon ces taux de descente, le vol à l’étude a dépassé les critères d’approche stabilisée de CHO.
1.18.3.8 Activités extracôtières menées par Canadian Helicopters Offshore
1.18.3.8.1 Généralités
Les SOP de CHO comprenaient un chapitre consacré aux procédures d’utilisation normalisées pour les activités extracôtières, mais des procédures extracôtières supplémentaires étaient également incluses dans d’autres chapitres.
1.18.3.8.2 Arrivée
Un exposé d’approche devait être effectué pour les approches à vue et aux instruments. Les SOP indiquaient que l’exposé VFR devrait préciser [traduction] :
- la personne qui effectuera l’atterrissage;
- la transition vers l’approche finale;
- le point d’atterrissage;
- le type d’atterrissageNote de bas de page 132.
1.18.3.8.3 Approches à vue dans des conditions météorologiques de vol à vue de jour
L’alinéa 602.115a) du RAC stipule qu’« [i]l est interdit à quiconque d’utiliser un aéronef en vol VFR dans l’espace aérien non contrôlé, à moins que [...] l’aéronef est utilisé avec des repères visuels à la surface [...]Note de bas de page 133 ». Selon le RAC, on entend par surface « [t]oute surface au sol ou sur l’eau, y compris une surface geléeNote de bas de page 134 ». D’après TC, une héliplateforme extracôtière ne répond pas aux critères énoncés dans le RAC pour être considérée comme une surface.Note de bas de page 135
Dans le secteur de l’aviation, il y a une certaine confusion quant aux conditions visuelles nécessaires pour voler en VMC. Afin d’offrir un peu plus de clarté, la Circulaire d’information 603-001 de TC indique ce qui suit : « Pendant un vol VMC, le pilote doit s’assurer d’avoir suffisamment de repères visuels pour interpréter le relief, les objets au sol et l’horizon afin de maintenir le contrôle et la direction de l’aéronefNote de bas de page 136. »
Afin de mener des activités VFR sous la barre des 1000 pieds AGL, dans un espace aérien non contrôlé comme celui qui entoure la TCF, le RAC et le COM de CHO précisent que les 2 conditions suivantes s’appliquent :
- la visibilité en vol ne doit pas être inférieure à 1 SM, sauf autorisation aux termes d’un certificat d’exploitation aérienneNote de bas de page 137;
- l’hélicoptère doit être utilisé hors des nuages.
Si les conditions ci-dessus étaient remplies, les pilotes de CHO pouvaient effectuer une approche à vue, conformément aux critères d’approche stabilisée de CHO, vers une héliplateforme surélevée. Le pilote qui disposait des meilleurs repères effectuait normalement l’atterrissage. Les SOP de CHO indiquaient qu’une approche à vue était amorcée à partir des paramètres suivants [traduction] :
- établi en approche finale à 1 NM de l’installation;
- environ 500 pieds au-dessus de la hauteur de la plateforme;
- à une vitesse de 75 KIAS (vitesse pouvant être ajustée par vents forts)Note de bas de page 138.
Selon la compagnie, une descente à angle constant (4,7°) était effectuée jusqu’à proximité de l’héliplateforme. Dans le cadre d’une approche à vue vers la TCF, les SOP exigeaient que l’hélicoptère soit établi en approche finale à 1 NM de l’installation, à 675 pieds RADALT et à une vitesse de 75 KIAS, ajustée en fonction des vents.
L’enquête a permis de déterminer que certains pilotes de CHO effectuaient des approches extracôtières à vue à un angle plus prononcé que l’angle de descente normalisé de 4,7° de CHO. La figure 16 présente une comparaison du profil de descente de l’événement à l’étude avec le profil de descente des SOP. À 0,7 NM, alors qu’il était dans le virage en approche finale, l’hélicoptère de l’événement à l’étude a franchi l’angle de descente de 4,7°; toutefois, la descente n’a pas commencé avant que l’hélicoptère ne se trouve à 0,43 NM de la TCF, ce qui a entraîné un angle d’approche initial de 7,1°.
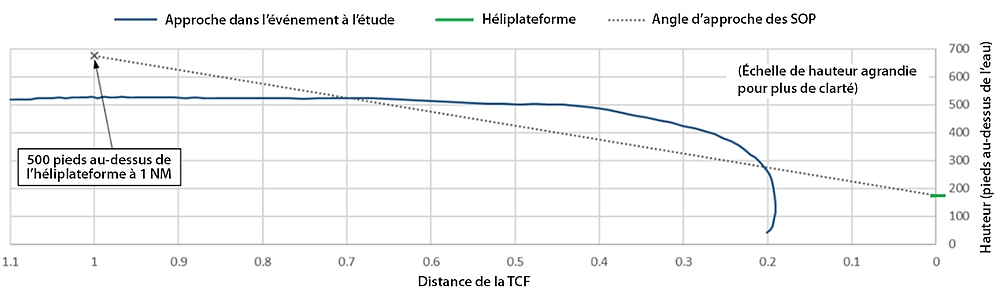
La procédure d’approche à vue de CHO n’incluait pas d’objectifs de progression intermédiaires (p. ex., altitude ou vitesse sol précises à une certaine distance de l’installation), généralement appelés « points cibles ». Les points cibles seront traités plus en détail dans une autre section du présent rapport.
Les SOP de CHO ne fournissaient aucune indication quant à l’utilisation du débrayage du compensateur dans une approche à vue. La compagnie considérait qu’il s’agissait d’une question de technique du pilote et permettait aux pilotes de décider s’ils voulaient utiliser au maximum le mode ATT et les poussoirs des compensateurs, ou enfoncer et tenir enfoncé le bouton de débrayage du compensateur cyclique. Certains pilotes de CHO préféraient effectuer des manœuvres à vue non couplées en tenant le bouton de débrayage du compensateur enfoncé. D’autres préféraient utiliser au maximum le compensateur d’effort comme moyen de réduire la charge de travail du pilote pendant les approches à vue. Certains des pilotes qui utilisaient la compensation d’effort réglaient une assiette d’environ 7,5° en cabré, en mode ATT, puis effectuaient de petites corrections en poussant les commandes contre la résistance du compensateur d’effort, ou utilisaient les poussoirs pour effectuer des ajustements mineurs pendant la descente.
En effectuant de petits ajustements au cyclique lorsqu’il est compensé, relâcher la pression sur le cyclique ramène le cyclique à la position de référence et à l’assiette correspondante qu’il devait maintenir selon l’ajustement initial. Ainsi, si un pilote éprouve une quelconque forme de désorientation spatiale, le simple fait de relâcher la pression du cyclique et d’augmenter la puissance devrait faire en sorte que l’hélicoptère adopte une assiette qui lui permettra de prendre de l’altitude en toute sécurité. Si des ajustements plus importants sont nécessaires, ceux-ci sont généralement effectués en enfonçant le bouton de débrayage du compensateur cyclique, en réglant à nouveau l’assiette, puis en relâchant le bouton de débrayage du compensateur.
Le collectif est utilisé pour contrôler la trajectoire de descente. Puis, à l’approche de la plateforme, le bouton de débrayage du compensateur est momentanément enfoncé et le cyclique est tiré vers l’arrière, jusqu’à un maximum de 15° en cabré, pour effectuer la décélération finale. Après la décélération finale, le bouton de compensation de l’effort du cyclique peut être relâché pour maintenir la nouvelle assiette souhaitée pendant les dernières étapes de l’atterrissage. Cette façon de faire réduit au minimum le temps pendant lequel le bouton de débrayage du compensateur est enfoncé pendant l’approche à vue.
Un examen de 7 vols (y compris le vol de l’événement à l’étude) consignés dans le FDR de l’événement à l’étude a révélé qu’environ 55 % des décollages ou atterrissages non couplés (effectués par différents équipages) ont été effectués avec le bouton de débrayage du compensateur cyclique enfoncé pour la majorité, voire la totalité, de la séquence. Pour le reste, la compensation d’effort était principalement activée, avec l’utilisation occasionnelle du bouton de débrayage du compensateur cyclique.
Dans le cadre de l’enquête, des écarts semblables ont été repérés chez les divers exploitants de S-92A du monde entier en ce qui concerne l’utilisation du débrayage de la compensation cyclique. Certains exploitants de S-92A encouragent activement l’utilisation du mode d’assiette et du poussoir du compensateur pour les manœuvres à vue, en particulier dans un DVE, afin de réduire la charge de travail des pilotes et le risque de désorientation spatialeNote de bas de page 139,Note de bas de page 140.
1.18.3.8.4 Procédures d’approche extracôtière / radar de bord dans des conditions météorologiques de vol aux instruments ou pour les vols de nuit
Les SOP de CHO indiquaient que la procédure Offshore/ARA devait être utilisée pour les approches extracôtières en IMC ou la nuit. Selon le RAC, des IMC sont présentes lorsque les conditions météorologiques sont inférieures aux minima précisés dans la sous-partie 602 du RAC.
La procédure Offshore/ARA de CHO était une procédure aux instruments approuvée par TC qui permettait à un hélicoptère d’effectuer une approche surveillée par un pilote vers une installation extracôtière dans des IMC. Cette procédure était menée pleinement couplée [traduction] « jusqu’à ce que l’aéronef se trouve dans des conditions de vol visuel et ait décéléré pour l’atterrissage. La RALT [RADALT] doit rester couplée jusqu’à ce que le pilote responsable de l’atterrissage amorce la descente vers l’héliplateformeNote de bas de page 141 ». Selon les SOP de CHO, [traduction] « les équipages effectueront normalement un maximum de 2 approches IMC vers la destinationNote de bas de page 142 ».
La procédure Offshore/ARA vers la TCF était normalement menée face au vent et amorcée à 7,0 NM de l’installation. Les pilotes devaient maintenir une altitude de 800 pieds ASL ou plus jusqu’à ce qu’ils franchissent le FAF, qui se trouve à 5,0 NM de l’installation. En franchissant le FAF, les pilotes utilisaient le poussoir du compensateur du collectif et du cap pour descendre à l’altitude minimale de descente, qui dans cette situation était la hauteur de l’héliplateforme plus 50 pieds (donc 225 pieds RADALT).
À 3,0 NM, la vitesse a été réglée à un maximum de 55 nœuds de vitesse sol afin de stabiliser la vitesse sol avant que l’aéronef arrive à 1,5 NM de l’installation.
Au cours d’une procédure Offshore/ARA de jour avec une vitesse sol de 60 nœuds ou moins, le point d’approche interrompue (MAP) se trouvait à 0,5 NM de l’installation. À 0,5 NM du MAP, le mode de cap était sélectionné afin qu’il puisse être utilisé pour virer vers l’héliplateforme si le contact visuel était établi ou s’en détourner si une approche interrompue était nécessaire.
Si le PM avait établi un contact visuel avec l’héliplateforme au MAP, le PM devait annoncer « visual » [visuel] et orienter le PF vers l’héliplateforme. Lorsque l’hélicoptère se trouvait à environ 0,5 NM de l’héliplateforme et qu’il se dirigeait vers celle-ci, les modes de vitesse anémométrique et de cap étaient désactivés et le cyclique devait être utilisé pour réduire davantage la vitesse sol et maintenir la bonne trajectoire. Les SOP indiquaient qu’une assiette en cabré de 3° à 4° assurerait la décélération requise à partir d’une vitesse sol de 55 nœudsNote de bas de page 143. Les SOP indiquaient également que [traduction] « [à] mesure que l’hélicoptère décélère par sustentation de translation (de 20 à 40 KIAS), il y a une tendance à l’augmentation de l’assiette en cabré [...]Note de bas de page 144 ». L’enquête a permis de déterminer que cette augmentation de l’assiette en cabré n’exigeait pas beaucoup de correction ou d’anticipation de la part du pilote.
À 0,25 NM, l’hélicoptère devrait décélérer jusqu’à ce que sa et la vitesse sol passe en dessous des 30 nœuds environ. Les SOP indiquaient également aux pilotes de maintenir une vitesse de rapprochement minimale au sol de 15 nœuds jusqu’à ce que les repères visuels soient suffisants pour contrôler en toute sécurité le taux de rapprochementNote de bas de page 145.
Pendant que l’hélicoptère approchait de l’héliplateforme, il demeurait couplé à l’altitude RADALT jusqu’à ce que l’image de visée soit atteinte pour une descente normale vers l’héliplateforme. Une fois l’image de visée interceptée, l’altitude RADALT serait découplée en appuyant sur le bouton de découplage sur le cycle ou en demandant au PM de la désélectionner sur le panneau de sélection de mode.
Selon les SOP de CHO, si les pilotes établissaient un contact visuel adéquat avec l’installation avant le MAP et que le plafond était d’au moins 300 pieds au-dessus de l’altitude minimale de descente, le pilote pouvait effectuer une transition en VMC pour l’atterrissageNote de bas de page 146. Les SOP stipulaient ce qui suit [traduction] : « Après le transfert du contrôle au pilote chargé de l’atterrissage, le pilote chargé de l’approche continue de surveiller les instruments, transmettant des renseignements verbaux pertinents, comme l’altitude, la vitesse verticale, la vitesse anémométrique ou au sol, et l’assiette, jusqu’à ce que le pilote chargé de l’atterrissage ait annoncé “Committed” [engagé]Note de bas de page 147. » Par conséquent, si au cours d’une procédure Offshore/ARA, les pilotes établissaient un contact visuel avec l’installation et que les nuages étaient basés à un minimum de 525 pieds RADALT, les SOP permettaient aux pilotes de maintenir le vol à vue sans utiliser les modes de maintien de l’AFCS.
1.18.3.8.5 Procédures d’approche interrompue
Selon les SOP de CHO, une remise des gaz à 0,5 NM ou plus au cours d’une procédure Offshore/ARA était effectuée en utilisant le mode de cap pour virer à 45° dans la direction d’approche interrompue, puis en sélectionnant « Go Around » [remise des gaz] pour amorcer une montéeNote de bas de page 148,Note de bas de page 149. Si l’hélicoptère se trouvait à moins de 0,5 NM, il serait couplé à l’altitude RADALT seulement. Dans cette situation, les pilotes baisseraient légèrement le nez (piqué à 2,5° sur l’indicateur d’assiette) et utiliseraient le cyclique pour se détourner de l’installation. Une fois que la vitesse aurait augmenté au-dessus de 50 KIAS (VMINI), le PF activerait le « Go Around » pour amorcer la montéeNote de bas de page 150.
Les SOP stipulaient que l’hélicoptère doit atteindre une altitude d’au moins 800 pieds ASL avant de se virer pour se préparer à effectuer une nouvelle approche ou pour se rendre à l’aéroport d’approche interrompueNote de bas de page 151.
Les SOP ne traitaient pas expressément d’une situation où une approche interrompue était nécessaire pendant une approche à vue.
L’enquête a permis de constater que certains exploitants de S-92A avaient des politiques non écrites interdisant aux pilotes d’abandonner une approche interrompue pour tenter une approche à vue. Dans un cas particulier, une compagnie a mis en œuvre cette politique informelle à la suite d’un incident où les pilotes avaient abandonné une approche interrompue et tenté d’effectuer une approche à vue dans un DVE. Au cours de la tentative d’approche, le manque de repères visuels avait entraîné des difficultés de maîtrise, et l’hélicoptère avait effectué une descente inopinée.
1.18.3.8.6 Procédures d’utilisation normalisées en environnement visuel dégradé
Certains exploitants d’hélicoptères extracôtiers ont des SOP propres à l’exploitation dans un DVE. Au moment de l’événement à l’étude, les SOP de CHO ne faisaient aucune référence au pilotage dans un DVE. Toutefois, à la suite de l’événement, CHO a révisé sa procédure d’approche extracôtière VMC et a ajouté une définition d’un DVE précisant qu’un tel environnement [traduction] « survient lorsqu’un aéronef est piloté dans des conditions de VMC, mais que les repères visuels dont dispose le pilote ne sont pas suffisants pour maintenir la bonne trajectoire de vol pendant le vol ou à l’atterrissageNote de bas de page 152 ». La version révisée citait, comme exemples d’un DVE, un [traductions] « brouillard masquant la surface de l’eau » et un « horizon indiscernable ».
1.18.4 Lignes directrices d’HeliOffshore sur la gestion des trajectoires d’approche
HeliOffshore est [traduction] « l’association internationale axée sur la sécurité pour le secteur de l’exploitation extracôtière d’hélicoptèresNote de bas de page 153 ». Fondée en 2014, elle représente plus de 100 organisations qui travaillent dans le secteur extracôtier ou y fournissent des services, y compris plus de 50 exploitants d’hélicoptères. CHO était membre d’HeliOffshore depuis 2015.
Un des domaines d’intérêt d’HeliOffshore est la gestion des trajectoires d’approche. L’association a relevé 5 éléments jugés essentiels à la conduite d’une approche stabilisée sécuritaire [traduction] :
- l’état énergétique;
- l’exposé d’approche;
- la gestion de la remise des gaz;
- les procédures de surveillance;
- l’utilisation de l’automatisationNote de bas de page 154.
L’état énergétique est particulièrement pertinent dans l’événement à l’étude. L’état énergétique s’entend des effets combinés de la vitesse anémométrique, du taux de descente, de l’assiette en tangage et du réglage de la puissance. Selon HeliOffshore, il y a eu de nombreux incidents mettant en cause un état d’énergie faible à moins de 500 pieds au-dessus de l’altitude d’atterrissage ou à moins de 0,5 NM de l’installation. Cela laisse entendre qu’il faut assurer une surveillance continue de l’état énergétique, plutôt que d’atteindre un point unique dans l’espace, où l’aéronef est considéré comme stable. Afin de réduire le risque d’une descente en état de faible énergie, un exploitant de S-92A a établi l’exigence que le couple moteur soit supérieur à 40 % avant 300 pieds au-dessus de l’aire d’atterrissage.
HeliOffshore recommande l’utilisation maximale de profils d’approche normalisés et reproductibles, ce qui améliore la surveillance et la détection des écarts. Par exemple, les lignes directrices d’HeliOffshore fournissent l’exemple d’un profil de descente à 5° (figure 17), qui n’est pas destiné à être utilisé comme approche aux instruments; il offre plutôt une approche normalisée qui peut être utilisée de jour comme de nuit en VMCNote de bas de page 155. Ce profil d’approche, réalisé à une vitesse sol constante de 45 nœuds jusqu’à 0,4 NM, nécessite un taux de descente d’environ 350 pi/min.
Selon les SOP d’un exploitant qui utilise l’approche normalisée, à chaque tranche de 0,2 NM le long de la trajectoire d’approche, des annonces normalisées sont lancées, y compris la distance restant à parcourir, la vitesse sol (avec indication « fast » [rapide] ou « slow » [lent], le cas échéant) et le profil d’approche (élevé ou bas). Ces annonces contribuent à accroître la conscience situationnelle et à réduire le risque de désorientation spatiale. À 0,4 NM, l’assiette en tangage est augmentée d’environ 5° pour atteindre la vitesse sol souhaitée de 10 à 15 nœuds lorsque l’hélicoptère approche du point de décision à l’atterrissage. L’enquête a permis de révéler que certains exploitants de S-92A ont adopté le profil à 5° d’HeliOffshore dans le cas d’approches à vue de jour comme de nuit. Selon un exploitant de S-92A qui utilise ce profil, la vitesse sol constante et la descente à faible pente atténuent le besoin de changements d’assiette en tangage, faisant qu’il est plus facile de déterminer si l’angle d’approche est maintenu. En maintenant une vitesse et une assiette en tangage constantes, l’angle de descente est alors commandé avec le collectif. En outre, l’approche peut être effectuée en grande partie sans appuyer sur le bouton de débrayage du compensateur du cyclique.
![Exemple de profil à 5° défini (Source : HeliOffshore, <em>Operational Effectiveness – Approach Path Management Guidelines</em>, numéro 1, version 3.0 [juillet 2017], p. 10, traduction par le BST)](/sites/default/files/fra/rapports-reports/aviation/2019/a19a0055/images/a19a0055-figure-17.jpg)
Pour les approches extracôtières en DVE ou de nuit, HeliOffshore recommande un profil semblable à la figure 18. Cette procédure présente des similitudes avec une procédure Offshore/ARA.
![Exemple d’approche de jour en environnement visuel dégradé ou de nuit (Source : HeliOffshore, <em>Operational Effectiveness – Approach Path Management Guidelines</em>, numéro 1, version 3.0 [juillet 2017], p. 11, traduction par le BST)](/sites/default/files/fra/rapports-reports/aviation/2019/a19a0055/images/a19a0055-figure-18.jpg)
Les lignes directrices d’HeliOffshore portant sur la gestion des trajectoires d’approcheNote de bas de page 156 comprennent un certain nombre de recommandations qui ont été adoptées par certains exploitants d’hélicoptères extracôtiers. Voici quelques-unes des recommandations les plus pertinentes dans le contexte de l’événement à l’étude :
- Pour une approche extracôtière, à 0,5 NM de l’héliplateforme, il devrait y avoir un point cible ainsi qu’une contre-vérification de la configuration et de la stabilisation. Poursuivre la trajectoire au-delà de ce point cible ne devrait se produire que si l’approche est stable, sinon il faut remettre les gaz. Avant d’atteindre un point cible, le PM doit vérifier et annoncer que les critères requis sont respectés. Si les critères sont remplis, le PM doit annoncer « 0.5–stabilized » [stabilisé], et le PF doit répondre « checked » [vérifié]. Si un ou l’autre des critères n’est pas satisfait au point cible, le PM annonce « not stabilized, go around » [non stabilisé, remise des gaz].
- Des critères d’état énergétique devraient être établis dans le COM. Il faut entre autres préciser un réglage minimal de puissance en dessous d’une vitesse minimale. Si la puissance baisse sous le réglage minimum prescrit, il faudrait effectuer une remise des gaz immédiate.
- La surveillance continue de l’état énergétique est plus importante que l’atteinte d’un point unique le long de l’approche.
- Les exploitants sont encouragés à inclure dans les SOP des annonces normalisées pour les activités normales et les écarts par rapport aux profils de vol normaux où l’aéronef est considéré stable.
- Les exploitants devraient s’assurer que les manuels d’exploitation expliquent clairement les procédures d’utilisation de l’automatisation et indiquent les cas où il existe un risque de confusion en ce qui a trait aux modes.
Comme nous l’avons souligné précédemment dans le présent rapport, au cours des dernières années, l’utilisation d’annonces de progression informelles a diminué au profit de l’utilisation de points cibles officiels associés à des critères précis qui doivent être confirmés et annoncés à haute-voix. Selon plusieurs exploitants membres d’HeliOffshore, l’élimination de ces annonces de progression informelles améliore la capacité du PM de surveiller la progression du vol, d’interpréter l’information, de déceler les écarts et de réagir comme il faut et quand il faut. HeliOffshore est aussi d’avis que ces annonces peuvent devenir une distraction, qu’elles augmentent le risque d’une phraséologie non normalisée et qu’elles peuvent mener à des sujets de discussion non pertinents.
1.18.5 Événements antérieurs
L’exploitation extracôtière d’hélicoptères se fait souvent loin de la terre ferme, dans des conditions météorologiques ou d’éclairage difficiles et sans soutien sur place pour aider les pilotes à prendre des décisions. Entre 2014 et 2018, il y a eu 47 accidents d’hélicoptères en exploitation extracôtière dans le monde, dont 23 accidents mortels qui ont fait au total 120 mortsNote de bas de page 157. Selon HeliOffshore, les 3 catégories suivantes représentaient ⅔ des 23 accidents mortels au cours de cette période [traduction] :
- impact sans perte de contrôle sur le relief ou sur l’eau (32 %);
- défaillance ou défaut de fonctionnement d’un système ou d’un composant autre que le groupe motopropulseur (22 %);
- perte de maîtrise en vol (16 %)Note de bas de page 158.
Au cours des dernières années, il y a eu un certain nombre d’événements liés à un DVE où l’hélicoptère s’est retrouvé dans un état indésirable, tandis que le bouton de débrayage du compensateur cyclique était tenu enfoncé. En 2011, le BST a enquêté sur un événement dans lequel un S-92A a subi une descente inopinée au départNote de bas de page 159. Dans cet événement, le PF a enfoncé et tenu enfoncé le bouton de débrayage du compensateur cyclique pendant qu’il partait d’une installation extracôtière dans des IMC. Peu après être entré dans un nuage, le PF a effectué une manœuvre ample et rapide du cyclique vers l’arrière juste avant que le bouton du compensateur cyclique ne soit relâché et que le mode de remise des gaz soit activé. L’hélicoptère a alors adopté une assiette en cabré avec décélération. Le PF a tenté de se rétablir manuellement de cette assiette en cabré en appuyant sur le bouton de débrayage du compensateur cyclique. Cependant, le PF a involontairement tiré le cyclique vers l’arrière, ce qui a causé une chute de la vitesse anémométrique sous VMINI et placé l’aéronef dans une assiette anormale de 23° en cabré. Le PF, touché par une incapacité subtile, possiblement due à la désorientation spatiale, n’a pas abaissé le nez de l’hélicoptère et augmenté le collectif pour sortir de l’assiette en cabré anormale. Les pilotes ont pu arrêter la descente une fois qu’ils sont descendus sous la base des nuages située à 200 pieds AGL en portant le couple moteur à 132 %. La descente a été arrêtée à 38 pieds au-dessus de l’eau.
En 2006, l’Air Accidents Investigation Branch (AAIB) du Royaume-Uni a enquêté sur un accident dans lequel un hélicoptère SA365N Dauphin 2 d’Aérospatiale a percuté la surface de la mer en tentant d’effectuer un atterrissage de nuit sur une héliplateforme extracôtière, dans de mauvaises conditions météorologiques. Les 5 passagers et 2 membres d’équipage sont morts.
Le profil d’approche dans cet événement donne à croire qu’il y aurait eu des problèmes d’évaluation du bon angle de descente en raison de repères visuels limités. Le rapport d’enquête a souligné ce qui suit [traduction] :
L’approche a été effectuée essentiellement en se fiant à des repères visuels. Dans des conditions de noirceur et de ciel couvert, il est probable que certains repères aient été amoindris, voire absents. Par exemple, sans un horizon distinct, l’évaluation de l’assiette en tangage et de l’angle d’approche (par rapport à la position de la plateforme sous l’horizon) serait compromise. Sans repères de texture dans le plan du sol (dans ce cas, la surface de l’eau), le jugement de l’assiette en tangage et de l’angle d’approche par inférence selon la perspective de texture serait également compromis, tout comme l’évaluation de la distance par rapport à la plateformeNote de bas de page 160.
L’AAIB a déterminé que le PF enfonçait et tenait enfoncé le bouton de débrayage du compensateur cyclique et a effectué d’amples manipulations des commandes (ce qui a entraîné une assiette en piqué atteignant 38°). Selon le rapport, le fait d’enfoncer et tenir enfoncé le bouton de débrayage du compensateur cyclique [traduction] :
a entraîné la perte de toute référence pour le vol rectiligne en palier, ainsi que l’augmentation de la probabilité que des manipulations inadéquates des commandes soient faites [...]; l’utilisation du FTR [débrayage du compensateur d’effort] aurait permis de commander de grands angles d’assiette avec peu de rétroaction tactile à l’équipageNote de bas de page 161.
Plus récemment, en 2014, un AW139 d’AgustaWestland s’est écrasé la nuit dans des conditions de brouillard, et les 4 personnes à bord ont été blessées mortellement. L’enquête a permis de déterminer que le pilote a tenté de commander manuellement l’hélicoptère en enfonçant le bouton de débrayage du compensateur sur le cyclique et la gâchette de débrayage du compensateur sur le collectif. Peu après avoir décollé à la verticale dans l’obscurité et le brouillard, l’hélicoptère a piqué progressivement jusqu’à ce qu’il percute le solNote de bas de page 162.
1.18.6 Considérations relatives au rendement humain
1.18.6.1 Prise de décisions des pilotes
Une prise de décisions efficace suppose que l’on comprenne correctement la situation actuelle, que l’on en reconnaisse les implications, que l’on élabore un ou des plans d’action, ainsi que des solutions de rechange, et que l’on mette en œuvre une ligne de conduite. De nombreux facteurs influent sur ce processus.
Un aspect important du processus décisionnel est le modèle mental d’une personne Note de bas de page 163. Le modèle mental dépend en grande partie de la façon dont une personne comprend les circonstances, de ses attentes à l’égard de la suite des événements et de son expérience passée. Les gens font appel à leur expérience antérieure et à leurs connaissances pour catégoriser rapidement la situation qu’ils vivent et exercer leur jugement Note de bas de page 164. À mesure qu’un pilote acquiert de l’expérience en vivant des situations nouvelles, ces situations et le plan d’action choisi créent des correspondances potentielles pour les décisions futures.
Si le temps le permet, les pilotes peuvent recueillir plus d’information afin de maximiser leur conscience situationnelle, de les aider à examiner les implications de la situation actuelle et d’effectuer une projection dans l’avenir pour prévoir les résultats des plans d’action possibles. Toutefois, dans les situations où il y a une pression temporelle réelle ou perçue (c.-à-d., auto-imposée), les pilotes expérimentés ont tendance à comparer rapidement la situation actuelle à leur expérience passée et à choisir le plan d’action qui semble le plus susceptible d’être efficace, plutôt que d’envisager plusieurs options Note de bas de page 165.
Dans de nombreux cas, les experts peuvent établir une correspondance appropriée entre la situation actuelle et une situation antérieure. Toutefois, dans certaines circonstances, cette façon de faire peut conduire à des décisions fondées sur une compréhension inexacte ou incomplète de la situation, de ses implications ou des autres plans d’action possibles. Si une décision présentant un risque plus élevé produit un résultat positif, elle peut amener une personne à être plus ouverte à des comportements risqués, ce qui augmente la probabilité qu’ils répètent ces comportements par la suite Note de bas de page 166, Note de bas de page 167.
Des études ont démontré que [traduction] « les pilotes ont tendance à sous-estimer la probabilité de perte de maîtrise et à surestimer leur capacité de continuer à maîtriser l’aéronef en cas de perte de repères visuels Note de bas de page 168 ». De même, les pilotes qui acceptent délibérément un risque accru (p. ex. piloter dans un DVE) ont tendance à avoir une plus grande tolérance au risque, à ressentir moins d’anxiété dans de telles situations et à percevoir le risque comme étant relativement faible Note de bas de page 169. Une erreur d’appréciation du risque peut conduire à des décisions inadéquates, et à un comportement dangereux; la perception du risque peut conduire à un comportement risqué.
Des facteurs organisationnels peuvent aussi avoir une influence directe ou indirecte sur la prise de décisions des pilotes. Les SOP appuient directement la prise de décisions des pilotes en leur fournissant ce que la compagnie considère comme des solutions efficaces prédéterminées pour des situations particulières. Les SOP établissent les attentes quant aux niveaux de risque acceptables, que les pilotes utilisent comme cadre de référence lorsqu’il est nécessaire de prendre une décision opérationnelle.
La prise de décisions du pilote peut également être influencée par les normes qui peuvent se manifester au sein d’une organisation. La volonté d’atteindre les objectifs organisationnels peut faire apparaître au fil du temps des comportements bien intentionnés qui augmentent progressivement le risque. Pour cette raison, il est important que les organisations insistent sur l’importance du respect des SOP et repèrent les pratiques non officielles qui augmentent le niveau de risque Note de bas de page 170.
1.18.6.2 Rétrécissement de l’attention
Les pilotes travaillent dans un environnement complexe qui comporte plusieurs sources et types de renseignements à surveiller. Étant donné qu’il y a des limites à la capacité d’attention des êtres humains, les pilotes doivent soigneusement établir les priorités pour s’assurer que les renseignements pertinents ne sont pas négligés.
La charge de travail dépend du nombre de tâches à accomplir dans un laps de temps donné. Si le nombre de tâches à accomplir augmente, ou si le temps disponible pour les accomplir diminue, la charge de travail augmente. À mesure que la charge de travail augmente, la charge cognitive du pilote augmente également. Ces charges cognitives accrues peuvent nuire à la capacité d’un pilote de percevoir et d’évaluer les indices dans son environnement, et peuvent mener à un rétrécissement de son attention Note de bas de page 171, Note de bas de page 172.
Un rétrécissement de l’attention se produit lorsque [traduction] :
la personne concentre toute son attention consciente sur un nombre limité de repères environnementaux en en excluant d’autres dont le caractère détectable est de manière subjective égal ou supérieur, ou dont le degré de priorité est plus immédiat Note de bas de page 173.
Les signaux pertinents peuvent être disponibles; toutefois, les personnes qui font face à une charge de travail élevée ont tendance à limiter leur attention aux stimuli qu’elles perçoivent comme les plus importants ou les plus pertinents dans le contexte de la tâche à accomplirNote de bas de page 174. De la même façon, le rétrécissement de l’attention est plus susceptible de se produire lorsqu’il y a une forte intensité de motivation ou un état d’excitation ou de stress élevé Note de bas de page 175. Si un pilote accorde une plus grande importance à des repères externes, il peut détourner son attention des instruments de vol, ce qui peut détériorer la conscience situationnelle et permettre que des écarts ne soient pas décelés Note de bas de page 176, Note de bas de page 177.
Dans une étude portant sur 15 accidents, une perception inexacte était à l’origine de 72 % des défaillances de la conscience situationnelle Note de bas de page 178. Puisque le rétrécissement de l’attention peut conduire à une perception inexacte, il représente un risque important dans des domaines complexes et à risque élevé, comme l’aviation Note de bas de page 179.
Pour réduire la probabilité d’un rétrécissement de l’attention, les pilotes doivent continuellement évaluer leur situation. Il s’agit de vérifier les sources de renseignements pertinentes, comme les affichages dans le poste de pilotage, afin d’assurer une perception exacte de la situation et de déterminer si le plan produit les résultats voulus ou s’il faut le modifier. Dans un aéronef multipilote, les communications des autres membres d’équipage peuvent être essentielles pour reconnaître et surmonter les effets du rétrécissement de l’attention.
1.19 Techniques d’enquête utiles ou efficaces
Sans objet.
2.0 Analyse
2.1 Généralités
Aucun élément n’indique que l’événement ait pu être causé par une défaillance d’un système de l’aéronef. En conséquence, l’analyse porte essentiellement sur les facteurs opérationnels et humains qui ont contribué à la descente inopinée pendant une tentative d’approche à vue vers l’installation centrale Thebaud (TCF).
De plus, l’analyse porte sur certains facteurs organisationnels associés aux procédures d’utilisation normalisées (SOP) et à la surveillance des données de vol, aux systèmes d’avertissement de proximité du sol améliorés et aux enregistreurs de conversations de poste de pilotage, dans le but d’améliorer la sécurité dans le transport aérien.
2.2 Descente inopinée
2.2.1 Approche non stabilisée
Selon les tableaux des performances, un couple moteur d’environ 39 % était requis pour une descente de 500 pi/min à une vitesse anémométrique de 60 nœuds (KIAS). Par conséquent, comme la vitesse anémométrique diminuait lors de l’approche finale, le couple moteur devait être supérieur à 39 %pour maintenir le taux de descente à moins de 500 pi/min. Toutefois, lors de l’événement, la puissance a été réglée à un couple moteur d’environ 27 % et le cyclique a été tiré vers l’arrière, pour réduire la vitesse de l’hélicoptère vers l’avant, ce qui a entraîné une assiette en cabré de presque 17°.
En raison d’un fort cabré, la vitesse anémométrique de l’hélicoptère a commencé à diminuer, et l’hélicoptère a commencé à descendre rapidement. L’hélicoptère, qui se trouvait déjà sur le côté arrière de la courbe de puissance du S-92A, s’est ainsi retrouvé à au moins 10 % de couple moteur sous le réglage de puissance requis pour sa vitesse anémométrique d’approche initiale. Par conséquent, l’hélicoptère est entré dans un état de faible énergie : il volait à faible vitesse anémométrique, avec un taux de descente élevé, une assiette en cabré et un réglage de faible puissance.
L’état de faible énergie de l’hélicoptère n’a pas été détecté par l’équipage de conduite, qui était concentré sur l’héliplateforme surplombant le brouillard dans une zone sans horizon perceptible. L’absence de repères visuels pendant l’approche dans un environnement visuel dégradé a fait en sorte qu’il était plus difficile pour les pilotes de constater que l’hélicoptère descendait rapidement, avec un glissement latéral croissant vers la gauche en raison d’une poussée involontaire du cyclique vers la gauche. Par conséquent, l’hélicoptère a rapidement dépassé la limite de taux de descente en approche stabilisée établie par Canadian Helicopters Offshore (CHO) (soit 500 pi/min).
Fait établi quant aux causes et aux facteurs contributifs
L’approche de l’hélicoptère est devenue instable en raison d’un profil de vol inopiné à faible énergie et à taux élevé de descente.
Peu après le rétablissement à la suite de la descente inopinée au cours de l’approche de la TCF, une deuxième descente inopinée s’est produite lorsque l’hélicoptère a atteint l’altitude radar (RADALT) de 1350 pieds. À ce moment-là, l’équipage de conduite tentait de comprendre ce qui venait de se produire et de déterminer quels systèmes avaient été perdus pendant l’événement. L’équipage de conduite a ainsi eu un moment d’inattention qui a donné lieu à un taux de descente inopiné. Alors que l’équipage de conduite déterminait que l’hélicoptère était encore manœuvrable, les pilotes se sont aperçus de la descente inopinée, et ont pris des mesures correctives.
2.2.2 2.2.2 Anneau tourbillonnaire
Alors que l’hélicoptère descendait sous 250 pieds RADALT, il était en descente prononcée de 800 pi/min, à très basse vitesse anémométrique et en vol propulsé. Cette combinaison de conditions a entraîné une situation hautement propice à un anneau tourbillonnaire (VRS), à un point critique de l’approche – en courte finale, seulement 100 pieds au-dessus de l’héliplateforme.
Lorsque le pilote aux commandes (PF) a instinctivement augmenté le collectif pour réduire le taux de descente de l’hélicoptère, cela a aggravé la situation et le taux de descente de l’hélicoptère a augmenté rapidement pour atteindre 1800 pi/min. Le tout n’a laissé que très peu de temps aux pilotes (environ 3 secondes) pour se rendre compte de ce qui se passait et pour tenter de rétablir l’hélicoptère avant sa descente dans le brouillard.
Une fois dans le brouillard, les pilotes ont agi décisivement (en commandant un surcouple moteur) ce qui, en combinaison avec le glissement latéral involontaire de l’hélicoptère vers la droite, a amené l’hélicoptère à sortir du VRS alors qu’il était à aussi peu que 70 pieds RADALT et a permis d’éviter une collision avec l’eau. Bien que le VRS n’ait pas causé l’instabilité de l’hélicoptère dans l’approche, il a contribué au fait que l’hélicoptère soit venu si près de l’eau (13 pieds) quand il est descendu dans la couche de brouillard et l’a traversée.
Le VRS dans lequel l’hélicoptère est entré au cours de cet événement met en évidence l’importance d’un respect rigoureux des critères d’approche stabilisée, ainsi que d’une contre-vérification et d’une surveillance minutieuses des instruments de vol, en particulier dans un DVE.
Fait établi quant aux causes et aux facteurs contributifs
L’augmentation de puissance alors que l’hélicoptère volait à une vitesse anémométrique faible et suivait un taux de descente élevé selon un angle d’approche prononcé et à basse vitesse anémométrique a entraîné l’entrée de l’hélicoptère dans le VRS. Cette situation a contribué à la descente rapide de l’hélicoptère à travers la couche de brouillard, ce qui a amené l’aéronef à 13 pieds de l’eau.
2.2.3 Rétrécissement de l’attention
Dans le cadre d’une approche extracôtière à vue, le PF s’appuie principalement sur les repères visuels dans l’environnement, conjointement avec des contre-vérifications régulières des instruments de vol. Dans un DVE, la contre-vérification et la surveillance efficaces des instruments sont particulièrement importantes, en raison du manque de repères visuels, pour aider le PF à conserver la maîtrise de l’hélicoptère et pour réduire le risque de désorientation spatiale.
Lorsque l’hélicoptère est sorti de virage en approche finale à vue, il était plus rapproché et plus bas que ce qui était prévu par les SOP de CHO, et à une vitesse supérieure à la normale pour sa proximité de la TCF. De plus, le PF occupait le siège de gauche, de sorte qu’il n’avait pas une bonne vue de la TCF avant que l’hélicoptère ne sorte de virage en approche finale. Les pilotes, en particulier le PF, avaient ainsi beaucoup moins de temps pour évaluer le taux de rapprochement de l’hélicoptère et pour établir une approche stabilisée.
Cette approche non normalisée a condensé le temps dont disposait le PF, qui a dû manipuler les commandes de manière plutôt décisive (c.-à-d. cyclique vers l’arrière et couple moteur à 27 %) pour amorcer la descente et ralentir, à partir d’une position bien à l’intérieur du point de départ normal pour une approche à vue. Ces manipulations des commandes, effectuées sans l’aide du compensateur d’effort, dans un DVE, ont augmenté considérablement la charge de travail du PF.
Pendant que l’hélicoptère descendait, l’attention des 2 pilotes était principalement portée sur l’héliplateforme, qui était entourée de nuages et qui surplombait une couche de brouillard. Lorsque le PF a initialement augmenté l’assiette en cabré de l’hélicoptère à près de 17°, le pilote surveillant (PM) l’a détecté et a lancé l’annonce adéquate pour informer le PF. À ce moment-là, la charge de travail à l’intérieur du poste de pilotage a encore augmenté parce qu’un temps précieux a été perdu pendant que le PF tentait de rectifier, et que le PM continuait de surveiller, l’assiette en cabré, tout en poursuivant l’approche dans un DVE.
En raison de ce rétrécissement de l’attention, la priorité accordée par les pilotes aux repères visuels extérieurs (c.-à-d. l’héliplateforme), puis à l’assiette en cabré excessive de l’hélicoptère, a fait en sorte que des instruments de vol critiques ont été exclus de la contre-vérification des instruments par les pilotes. En particulier, les pilotes n’ont pas reconnu ou perçu le taux de descente élevé (qui a culminé à 1800 pi/min), le couple moteur faible (27 %) et la basse vitesse (moins de 30 KIAS), tout comme ils n’ont pas perçu que les manipulations des commandes avaient placé l’hélicoptère dans un glissement à gauche (jusqu’à 40°). La combinaison de ces facteurs a donné lieu à une approche instable qui n’a pas été décelée jusqu’à ce que l’hélicoptère pénètre dans le banc de brouillard sous l’héliplateforme, 25 secondes après la désactivation des pilotes automatiques pour amorcer la descente finale.
Fait établi quant aux causes et aux facteurs contributifs
Les pilotes ont subi un rétrécissement de l’attention en raison de l’augmentation de la charge de travail alors qu’ils effectuaient une approche extracôtière à vue non normalisée dans un environnement visuel dégradé. Par conséquent, les pilotes ont négligé la contre-vérification des instruments, ce qui les a empêchés de se rendre compte en temps opportun que l’approche était devenue instable.
2.2.4 Utilisation du compensateur d’effort dans un environnement visuel dégradé
Lorsque d’importants repères visuels sont présents, les pilotes peuvent facilement manœuvrer l’hélicoptère avec le bouton de débrayage du compensateur cyclique enfoncé. Toutefois, comme le démontrent les études et les manuels de manœuvre des aéronefs de l’Aviation royale canadienne (ARC), ainsi que des enquêtes sur des accidents antérieurs, la charge de travail des pilotes augmente et la précision diminue lorsque les pilotes tentent de voler en tenant le bouton du compensateur cyclique enfoncé dans un DVE. Dans un tel environnement, l’utilisation du compensateur d’effort réduit la charge de travail du pilote et augmente les marges de sécurité en fournissant au pilote une certaine capacité de contrôle automatisé et une position de cran de référence qui est réglée pour une assiette de tangage ou d’inclinaison connue.
Dans cet événement, le PF a enfoncé et tenu enfoncé le bouton de débrayage du compensateur cyclique pour effectuer manuellement une approche à vue non normalisée dans un DVE. Le manque de repères visuels pendant l’approche aurait présenté des défis importants en ce qui a trait au contrôle de l’assiette (tangage, inclinaison et lacet), à l’image de visée (angle d’approche), à l’évaluation de l’altitude (hauteur au-dessus de l’eau) et à l’appréciation du taux de rapprochement (vitesse). Avec le bouton de débrayage du compensateur enfoncé et tenu enfoncé, l’efficacité globale du système de commandes automatiques de vol (AFCS) a été réduite, puisqu’il n’y avait pas de sensation artificielle (en raison du débrayage du frein magnétique) ni de position de référence du compensateur (cran de référence) pour aider le PF à comprendre le déplacement du cyclique. Ce manque de sensation artificielle, combiné à des repères visuels inadéquats sous, autour et derrière l’héliplateforme, a augmenté la charge de travail du pilote, rendant plus difficile pour le PF de respecter le profil de vol voulu. En conséquence, l’assiette a atteint presque 17° en cabré, le taux de descente est devenu excessif et une glissade vers la gauche s’est accentuée lors de l’approche finale.
Cette combinaison de conditions a placé l’hélicoptère dans un régime de vol particulièrement propice à l’entrée de l’hélicoptère en VRS, et qui a effectivement entraîné un VRS et une descente dans la couche de brouillard.
Fait établi quant aux causes et aux facteurs contributifs
Le fait d’enfoncer et tenir enfoncé le bouton de débrayage du compensateur cyclique en pilotant dans un DVE a augmenté la charge de travail du pilote et contribué à des difficultés de contrôle ayant engendré une approche instable qui s’est traduite par un VRS.
Ni le manuel de vol du giravion S-92A ni les SOP de CHO ne formulaient de recommandations quant à l’utilisation du bouton de débrayage du compensateur dans des conditions telles qu’un DVE, ou de mises en garde contre les dangers connexes possibles. Le fabricant et l’exploitant estimaient tous deux que l’utilisation du bouton de débrayage du compensateur cyclique était une question de préférence du pilote. Ainsi, en l’absence de directives précises du fabricant concernant l’utilisation du débrayage du compensateur, rien n’empêche ni ne décourage les pilotes du S-92A d’enfoncer et de tenir enfoncé le bouton de débrayage du compensateur lorsque l’aéronef est manœuvré à vue dans un DVE. Par conséquent, il est probable que les pilotes continueront d’utiliser le débrayage du compensateur dans un DVE sans comprendre pleinement les risques qui y sont associés, se mettant eux-mêmes et mettant leurs passagers en danger.
On s’attend non seulement à ce que le fabricant joue un rôle pour assurer la sécurité du vol, mais également à ce que les exploitants repèrent les domaines de risque et mettent en œuvre des SOP pour atténuer les dangers connexes. Par exemple, certains exploitants extracôtiers de S-92A ont mis en œuvre des SOP portant sur l’utilisation du compensateur pour s’assurer que les pilotes de la compagnie utilisent le niveau le plus approprié d’assistance de l’AFCS. De même, certains manuels de manœuvre et d’exploitation normalisées d’aéronefs de l’ARC comprennent des directives ou des conseils semblables.
Au moment de l’événement, les SOP de CHO n’incluaient pas de procédures ou de recommandations relatives à l’utilisation du débrayage du compensateur du cyclique dans un DVE. En outre, il n’y avait pas de normalisation quant à la façon dont les pilotes de CHO utilisaient le débrayage du compensateur pendant des manœuvres à vue. Ce manque de normalisation a entraîné une variabilité – ainsi qu’une efficacité réduite – dans la façon dont les pilotes de S-92A de la compagnie utilisaient le bouton de débrayage du compensateur dans l’environnement extracôtier.
Fait établi quant aux risques
Si les manuels de vol des fabricants et les SOP des exploitants ne contiennent pas de lignes directrices pour l’utilisation du bouton de débrayage du compensateur cyclique, il pourrait en résulter des problèmes de contrôle de l’aéronef dans un DVE en raison de l’utilisation sous-optimale de l’AFCS.
2.2.5 Désorientation spatiale et environnement visuel dégradé
Au moment de l’événement, l’héliplateforme se trouvait au-dessus d’une couche de brouillard, et la structure était entourée de nuages. Ces conditions empêchaient les pilotes de manœuvrer l’aéronef en se référant à la surface, comme l’exige l’article 602.115 du Règlement de l’aviation canadien. De plus, l’horizon n’était pas visible en raison de la vaste couverture nuageuse autour de la TCF. Par conséquent, les conditions au moment des faits à l’étude répondaient aux critères des conditions météorologiques de vol aux instruments (IMC), représentant un DVE en raison du manque de repères visuels pour aider à l’orientation spatiale (p. ex. position et vitesse de changement de position) et au contrôle de l’aéronef. Les pilotes auraient ainsi éprouvé des difficultés à évaluer avec précision la hauteur, la vitesse et la distance. Puisque l’horizon et la surface de l’eau étaient invisibles, c’est la TCF, et plus particulièrement l’héliplateforme par rapport à la plateforme extracôtière et aux obstacles, qui est devenue le principal repère visuel.
Dans cet événement, sans autres repères pour gérer la trajectoire d’approche, l’attention des 2 pilotes a principalement été portée sur l’héliplateforme; ils ont donc accordé moins d’attention à la stabilité de l’approche.
Fait établi quant aux causes et aux facteurs contributifs
Au moment de l’événement à l’étude, des IMC étaient présentes. Ces conditions ont engendré un DVE qui était particulièrement propice à la désorientation spatiale et qui offrait des repères inadéquats pour permettre une approche à vue vers la TCF.
Lorsque la descente finale a été amorcée, le PF avait une vue dégagée vers l’héliplateforme. Le PF avait de l’expérience dans des conditions météorologiques semblables. Il ne prévoyait donc pas avoir de difficulté à effectuer une approche à vue. Cependant, au début de la descente, l’hélicoptère a rapidement dépassé les critères d’une approche stabilisée. L’absence de repères visuels nets pour faciliter l’orientation verticale et latérale de la trajectoire de vol a fait en sorte que le PF a éprouvé des difficultés à maintenir une bonne orientation spatiale.
D’après ses manipulations des commandes (assiette en cabré de presque 17° et cyclique à gauche qui a entraîné un glissement à gauche), il est évident que le PF souffrait d’un certain degré de désorientation spatiale et qu’il ignorait que l’hélicoptère descendait rapidement, à basse vitesse anémométrique, avec un glissement important vers la gauche. Lorsque le PF a décelé que l’hélicoptère descendait trop rapidement, à environ 250 pieds RADALT, il a augmenté la puissance pour réduire la descente. Cependant, l’aéronef est entré en VRS et a entamé une descente rapide dans la couche de brouillard.
Lorsque l’hélicoptère est descendu dans le banc de brouillard et que le PF a perdu le contact visuel avec l’héliplateforme, la situation ne correspondait pas à la compréhension qu’en avait le PF. Le PF a alors dû interpréter cette nouvelle information inattendue. Tandis que le PF constatait l’augmentation rapide du taux de descente, qui a culminé à 1800 pi/min, les pressions cognitives auraient été considérablement accentuées, ce qui a contribué au délai avant que le PF ne signale au PM qu’il avait perdu le contact visuel avec l’héliplateforme.
Bien que le PF ait tenté d’amorcer une remise des gaz, le PM a d’abord donné des indications verbales, puis a physiquement aidé le PF dans les dernières étapes de la descente, quand le collectif a été augmenté rapidement en même temps que le cyclique était ajusté pour établir une assiette horizontale de remise des gaz.
Fait établi quant aux causes et aux facteurs contributifs
Il est probable que le PF a été touché par une incapacité subtile en raison d’une désorientation spatiale découlant de la descente rapide et inattendue de l’hélicoptère dans la couche de brouillard. En conséquence, la mesure de rétablissement a été initialement retardée jusqu’à ce que les pilotes établissent un contact visuel avec l’eau et que le collectif soit augmenté rapidement pour arrêter la descente.
2.2.6 Coordination de l’équipage
Une fois que les 2 pilotes se sont rendu compte que l’hélicoptère avait effectué une descente inopinée, à un taux de descente très élevé, dans le banc de brouillard, toute leur attention a été portée sur la prévention d’un impact sur l’eau. Le PM a aidé physiquement le PF à mettre l’hélicoptère en palier et à arrêter la descente à basse altitude au-dessus de l’eau. Toutefois, le PM n’a pas officiellement pris les commandes de l’aéronef à ce moment. C’est après l’arrêt de la descente qu’il l’a fait, en utilisant la terminologie standard « I have control » [j’ai le contrôle]. Il a ensuite utilisé la TCF comme référence pour commencer une ascension à vue.
Dans cet événement, les 2 pilotes étaient aux commandes pendant la phase finale de la descente. Pourtant, l’équipage a réussi à arrêter la descente et à éviter l’impact sur l’eau. Toutefois, dans la perspective de la gestion des ressources de l’équipage (CRM), il est important de reconnaître qu’un transfert de contrôle net réduit le risque que les pilotes fassent des manipulations de commandes opposées. Cela revêt une importance particulière lorsqu’un pilote pourrait être atteint d’une incapacité quelconque susceptible d’interférer avec les manipulations des commandes de vol adéquates ou les empêcher.
Fait établi quant aux risques
Si les pilotes d’un aéronef multipilote effectuent en même temps des manipulations de commandes pendant que l’aéronef se trouve dans un état indésirable, il y a un risque que les efforts de rétablissement deviennent plus difficiles et que les marges de sécurité se réduisent.
2.3 Prise de décisions des pilotes
Le vol avait été retardé de plusieurs jours en raison de la mauvaise visibilité et des nuages à basse altitude. Il est probable que la décision des pilotes de tenter et de poursuivre une approche à vue dans un DVE ait été influencée, directement ou indirectement, par un certain nombre de facteurs :
- après 2 approches manquées, le but (c.-à-d. l’atterrissage sur l’héliplateforme) semblait soudainement réalisable;
- l’hélicoptère avait suffisamment de carburant pour tenter une 3e approche, mais il approchait de la quantité minimale de carburant de déroutement;
- l’héliplateforme était clairement visible pour les pilotes;
- les pilotes savaient que l’héliplateforme pouvait rapidement être de nouveau dissimulée;
- l’hélicoptère se trouvait hors des nuages entre les couches, sans qu’il y ait de risque immédiat apparent;
- les 2 pilotes étaient des pilotes d’hélicoptère en milieu extracôtier chevronnés;
- les 2 pilotes avaient déjà été dans des conditions météorologiques semblables;
- il n’était pas rare que les pilotes de CHO fassent des approches à vue au-dessus d’une couche de brouillard;
- les SOP de la compagnie permettaient aux pilotes de maintenir le vol à vue pendant une approche extracôtière au radar de bord ((Offshore/ARA) ) s’ils sortaient des nuages au moins 300 pieds au-dessus de l’altitude minimale de descente;
- les pilotes avaient chacun une confiance considérable dans les capacités de vol de l’autre pilote;
- les pilotes d’hélicoptère sont habitués à intercepter la trajectoire d’approche finale à partir de différentes combinaisons de hauteur et de distance.
Il est probable que la combinaison de ces facteurs a contribué à la décision des pilotes de tenter l’approche à vue.
Pleinement conscients du fait qu’il n’y avait que peu de temps pour tenter une approche à vue, les pilotes auraient rapidement comparé la situation du moment à des situations antérieures afin de trouver une stratégie efficace. Les pilotes s’étaient déjà trouvés dans des conditions météorologiques semblables. Ils avaient donc confiance en leurs capacités à effectuer l’approche à vue en toute sécurité. De plus, les pilotes étaient conscients que certains éléments de leur situation correspondaient à certains aspects de la procédure d’approche Offshore/ARA. Par conséquent, lorsqu’ils ont pris la décision d’abandonner l’approche interrompue et d’adopter une approche à vue non normalisée, l’initiative semblait raisonnable d’après les facteurs susmentionnés. Toutefois, en optant d’effectuer une approche sans tarder, les pilotes ne se sont pas accordé beaucoup de temps (ils étaient en vent arrière durant environ 8 secondes avant de virer pour l’approche finale) pour examiner pleinement le risque de mener une approche à vue dans des conditions d’IMC et de DVE, ou pour envisager d’autres solutions qui refléteraient mieux les SOP et assureraient des marges de sécurité adéquates. Les pilotes ont ainsi été portés à sous-estimer les risques de poursuivre leur plan d’action initial, même s’il ne respectait pas les SOP de la compagnie ou le Règlement de l’aviation canadien.
Fait établi quant aux causes et aux facteurs contributifs
Les pilotes cherchant à s’acquitter de leur tâche dans un délai qu’ils s’étaient eux-mêmes imposé, leur processus décisionnel a été influencé par leur expérience passée et leur confiance réciproque. Par conséquent, les pilotes ont tenté une approche à vue non normalisée dans un DVE, sans examiner rigoureusement les risques et les autres options.
2.4 Procédures d’utilisation normalisées
2.4.1 Approches stabilisées
Les SOP de CHO indiquaient 6 conditions pour une approche stabilisée. Sur ces 6 conditions, les 2 seuls critères qui pouvaient être appliqués objectivement à une approche à vue étaient que l’hélicoptère doit être configuré pour atterrir et qu’il doit avoir un taux de descente maximal de 500 pi/min, à moins qu’un taux plus élevé n’ait été prévu. Contrairement à certains exploitants qui précisent les valeurs minimales de couple pendant l’approche (p. ex. un minimum de 40 % à 300 pieds au-dessus du point d’atterrissage), les SOP de CHO ne faisaient aucune référence à l’état énergétique dans leurs critères d’approche stabilisée. Par conséquent, les procédures de CHO n’abordaient pas un des éléments essentiels d’une approche stabilisée établis par HeliOffshore, une organisation dont CHO était membre. Comme il n’y avait aucun critère établi à surveiller, le risque qu’un état à faible énergie se manifeste et passe inaperçu était accru, comme cela a été démontré dans l’événement à l’étude.
Bien que ce ne fut pas inclus dans la définition d’une approche stabilisée de CHO, les SOP stipulaient également que l’approche devait être stable à 300 pieds au-dessus de l’altitude d’atterrissage, dans des conditions météorologiques de vol à vue (VMC). Sinon, une remise des gaz immédiate était nécessaire. CHO n’avait pas adopté la pratique recommandée par HeliOffshore d’exiger des équipages qu’ils vérifient et confirment verbalement que l’approche était stable à des points cibles précis (p. ex. 300 pieds au-dessus de l’altitude d’atterrissage).
Le fait d’établir des points cibles et des critères précis à confirmer crée des normes qui aident à orienter l’attention des pilotes sur les renseignements essentiels pendant une approche. Cela aide les pilotes à déceler rapidement les écarts, à maximiser leur conscience situationnelle et à s’assurer que seules les approches stabilisées sont poursuivies jusqu’à l’atterrissage. Dans l’événement à l’étude, le taux de descente de l’hélicoptère (520 pi/min, en augmentation) dépassait les critères d’approche stabilisée au moment de franchir le niveau de 300 pieds au-dessus de l’altitude d’atterrissage, 6 secondes après le début de la descente. Toutefois, en l’absence d’une procédure officielle de vérification d’une approche stabilisée, l’attention des pilotes n’a pas été attirée sur les instruments de vol qui auraient fourni les renseignements nécessaires pour reconnaître qu’une remise des gaz immédiate était nécessaire.
Fait établi quant aux causes et aux facteurs contributifs
Les SOP de CHO fournissaient à l’équipage de conduite des indications insuffisantes pour que les approches soient menées conformément aux lignes directrices d’approche stabilisée recommandées dans l’industrie.
2.4.2 Écarts par rapport aux procédures d’utilisation normalisées
Étant donné que l’hélicoptère se trouvait dans une zone dégagée entre deux couches de nuages après la deuxième approche interrompue, les pilotes n’ont pas perçu que le point de virage précoce, qui était contraire aux SOP de CHO, présentait un risque accru. Toutefois, en se mettant en palier à 500 pieds RADALT et en amorçant le virage vers la droite pour évaluer les conditions, les pilotes ont perdu de vue la TCF en lui tournant le dos pendant une partie du virage. L’hélicoptère est ainsi sorti de virage à environ 1 mille marin (NM), la TCF se trouvant du côté droit de l’hélicoptère. Lorsque le virage pour l’approche finale a été terminé et que la descente a commencé, l’hélicoptère se trouvait à 0,43 NM de la TCF, à une vitesse anémométrique supérieure à la normale. Cette situation a considérablement réduit le temps disponible, par rapport aux SOP d’approche à vue de CHO, pour permettre à l’équipage de conduite d’évaluer la position et la vitesse de changement de position avant et pendant la descente finale afin d’assurer une approche stable.
Lorsque la descente a été amorcée, la charge de travail du pilote s’est accrue rapidement, car des manipulations plus décisives étaient nécessaires pour obtenir l’image de visée adéquate à proximité de la TCF. Peu après le début de la descente, le taux de descente a dépassé les 500 pi/min, ce qui indique une approche instable selon les SOP de CHO. L’approche est demeurée instable jusqu’à ce que l’hélicoptère descende dans le banc de brouillard.
Cet événement met en évidence le fait que des écarts par rapport aux SOP de la compagnie qui sont perçus comme mineurs, pris seuls ou en combinaison, peuvent créer par inadvertance une séquence d’événements qui porte le risque à des niveaux inacceptables.
Fait établi quant aux risques
Si les pilotes dérogent aux SOP, cela peut entraîner une augmentation involontaire de la charge de travail des pilotes et réduire les marges de sécurité à des niveaux inacceptables.
2.4.3 Procédures d’utilisation en environnement visuel dégradé
Dans le secteur de l’exploitation d’hélicoptères dans des activités extracôtières, les pilotes sont souvent confrontés à des changements rapides des conditions météorologiques, allant de VMC à IMC, avec un éventail de conditions intermédiaires. Au cours des dernières années, la communauté de l’exploitation d’hélicoptères en environnement extracôtier a pris des mesures pour atténuer certains des risques associés au vol dans des conditions météorologiques défavorables en formulant des recommandations de l’industrie sur la trajectoire d’approche. Ces recommandations comprennent des profils d’approche normalisés, par exemple pour les activités en DVE.
Au moment de l’événement à l’étude, CHO n’avait pas de SOP pour les DVE pouvant aider les pilotes à prendre des décisions. L’absence de directives explicites concernant le pilotage en DVE peut avoir rendu difficile pour les pilotes de bien comprendre les risques associés à une tentative d’approche à vue en IMC.
À la suite de l’événement, CHO a révisé la procédure d’approche extracôtière de jour en VMC afin d’inclure des considérations relatives à un DVE. Dans cette procédure révisée, CHO indiquait qu’un DVE se produit dans des VMC et qu’il comprend des phénomènes météorologiques tels qu’un brouillard qui cache la surface de l’eau et une absence d’horizon perceptible. Toutefois, ces conditions sont conformes à l’interprétation de Transports Canada des IMC. Comme cela a déjà été constaté dans l’industrie, cela porte à croire que la direction de CHO ne reconnaissait peut-être pas l’importance de définir clairement les exigences réglementaires relatives à la conduite d’un vol à vue dans un espace aérien non contrôlé, ce qui pourrait avoir contribué au fait que des pilotes de la compagnie tentaient des approches à vue dans des IMC.
Fait établi quant aux risques
Si les SOP d’une compagnie ne définissent pas clairement et n’établissent pas de procédures de pilotage en DVE, il y a un risque que les pilotes admettent un niveau de risque inacceptable en tentant de mener des manœuvres à vue dans des IMC ou dans un DVE.
2.4.4 Exposés d’approche
Selon les SOP de CHO, un exposé d’approche à vue était nécessaire pour déterminer qui effectuerait l’atterrissage, ainsi que le moment de la transition vers l’approche finale et le type d’atterrissage. Rien n’exigeait d’inclure dans l’exposé les mesures d’urgence, les points cibles ou les autres risques opérationnels pouvant exister. Par conséquent, les SOP n’établissaient pas clairement de cibles définies et faciles à reconnaître pour confirmer qu’une approche extracôtière à vue était stable.
Dans l’événement à l’étude, l’absence de critères exhaustifs dans l’exposé d’approche à vue peut avoir joué un rôle dans la décision de l’équipage de conduite de tenter une approche extracôtière à vue vers une héliplateforme se trouvant au-dessus d’une couche de brouillard et entourée de nuages.
Fait établi quant aux risques
Si les exposés d’approche ne sont pas suffisamment détaillés, il y a un risque que des dangers opérationnels ne soient pas pris en compte avant de tenter une approche.
2.4.5 Informations contradictoires dans les procédures d’utilisation normalisées
Bien qu’ils n’aient pas contribué à l’événement à l’étude, l’enquête a permis de déceler des divergences et des chevauchements dans les renseignements des SOP de CHO, ce qui aurait pu entraîner une confusion dans le poste de pilotage. Voici quelques exemples :
- Les SOP de CHO stipulaient qu’en VMC, une approche devait être stabilisée à 300 pieds au-dessus de l’altitude d’atterrissage. La même section des SOP indiquait aussi qu’il fallait amorcer immédiatement une remise des gaz si l’hélicoptère n’était pas stabilisé avant 250 pieds au-dessus de l’altitude d’atterrissage en VMC. Ces renseignements créaient un risque de confusion, car on ne savait pas s’il fallait lancer une remise des gaz immédiate si l’hélicoptère n’était pas stabilisé avant 300 ou avant 250 pieds au-dessus de l’altitude d’atterrissage en VMC.
- Selon les SOP de CHO, avec des passagers à bord, un taux de descente supérieur à 500 pi/min, autre qu’au cours d’une approche finale aux instruments, était considéré comme un taux de descente anormal qui devait être annoncé. Les SOP indiquaient également que le taux maximal de descente pour une approche stabilisée était de 500 pi/min. Toutefois, dans une autre section des SOP, il était énoncé qu’un taux de descente supérieur à 600 pi/min nécessitait une annonce normalisée. Par conséquent, il aurait été possible qu’un pilote ne sache pas avec certitude s’il était tenu d’annoncer le taux de descente lorsque ce taux était de 500 pi/min ou de 600 pi/min.
Fait établi quant aux risques
Si les SOP d’une compagnie contiennent des procédures contradictoires ou ambiguës, il y a une probabilité accrue d’erreurs de procédure qui peuvent réduire les marges de sécurité à des niveaux inacceptables.
2.5 Suivi des données de vol des hélicoptères de Canadian Helicopters Offshore
CHO avait un système de gestion de la sécurité qui utilisait le suivi des données de vol d’hélicoptère (HFDM) comme outil proactif pour cerner les risques opérationnels au quotidien. À cette fin, le programme visait à repérer les domaines où les équipages de conduite dérogeaient aux SOP. Un examen des paramètres suivis a révélé qu’il y avait plusieurs paramètres d’approche extracôtière; toutefois, la distance pour la dernière étape d’une approche à vue ou l’angle de la trajectoire de descente parcourue n’étaient pas suivis. Par conséquent, CHO n’avait aucun moyen de déterminer si ses pilotes respectaient la procédure d’approche à vue et les critères d’approche stabilisée.
L’enquête a permis de déterminer que certains pilotes ne respectaient pas toujours la distance finale prescrite de l’approche à vue, et que la trajectoire de descente de 4,7° n’était pas toujours suivie. Le programme HFDM de la compagnie n’utilisait pas activement les données de l’enregistreur de données de vol (FDR) et du système de surveillance des cycles de fonctionnement (HUMS) de l’aéronef pour détecter ces types d’écarts par rapport aux SOP de la compagnie.
Fait établi quant aux risques
Si le programme de suivi des données de vol d’une compagnie ne contrôle pas des paramètres précis établis dans les SOP, il réduit la capacité de la compagnie à cerner de façon proactive des tendances susceptibles de réduire les marges de sécurité.
2.6 Système d’avertissement de proximité du sol amélioré
Dans l’événement à l’étude, l’hélicoptère est entré en descente inopinée à taux très élevé et à basse vitesse anémométrique dans le banc de brouillard, avec le train d’atterrissage sorti. Malgré cela, le système d’avertissement de proximité du sol amélioré (EGPWS) de l’hélicoptère, conçu pour empêcher une collision accidentelle avec le relief, n’a pas alerté l’équipage de la situation.
Comme cela avait déjà été constaté dans le rapport d’enquête sur la sécurité du transport aérien A11H0001 du Bureau de la sécurité des transports du Canada (BST), le mode 1 de l’appareil Mk XXII de Honeywell est bloqué sur le S-92A. Ce mode n’est bloqué sur aucun autre hélicoptère équipé du Mk XXII. Selon Sikorsky, la décision de bloquer le mode 1 était fondée sur un nombre élevé de fausses alarmes reçues lors des essais de certification en 2002. L’année suivante, Honeywell a mis à jour l’enveloppe du mode 1 pour répondre à ces préoccupations concernant les alertes injustifiées. Malgré cela, le mode 1 est resté bloqué à bord du S-92A depuis plus de 17 ans, laissant les exploitants sans protection EGPWS pendant une phase courante de vol pour les exploitants d’hélicoptères extracôtiers.
Comme nous l’avons vu dans l’événement à l’étude, la descente s’est déroulée dans les limites de l’enveloppe du mode 1, et le système aurait fourni aux pilotes une alerte sonore « SINK RATE » [vitesse verticale de descente] lorsque l’hélicoptère franchissait 225 pieds RADALT en descente, et une alerte sonore « PULL UP! » [cabrer] lorsqu’il descendait sous la hauteur de l’héliplateforme de la TCF (174 pieds AGL). Par conséquent, si le mode 1 avait été activé sur le S-92A, il aurait averti l’équipage de conduite du taux de descente excessif avant l’entrée dans le banc de brouillard, ce qui aurait accru la conscience situationnelle de l’équipage quant à la gravité de la situation. Même si l’alerte du mode 1 n’aurait probablement pas empêché la descente inopinée dans le brouillard, elle aurait fourni à l’équipage de conduite des renseignements essentiels sur la descente, ce qui aurait rendu évident qu’une action immédiate et décisive était nécessaire.
En mars 2018, Sikorsky a décidé d’activer le mode 1, mais cette mesure n’est prévue que pour la fin de 2021 ou le début de 2022, avec le lancement de la version 11 du système de gestion avionique (AMS). Cette mise à jour logicielle (EGPWS-036) comprendra une enveloppe de mode 1 élargie, le mode 7 nouvellement mis au point et plusieurs autres améliorations. Une fois mises en œuvre, ces améliorations devraient réduire considérablement la probabilité qu’une descente inopinée passe inaperçue. Toutefois, jusqu’à ce que la version 11 de l’AMS soit installée, les capacités de l’EGPWS du S-92A resteront réduites en raison de l’absence du mode 1. Par ailleurs, le mode 7 ne sera pas homologué sur le S-92A en raison de préoccupations quant à l’utilisation de l’alerte sonore « CHECK AIRSPEED ».
En plus du blocage du mode 1, avec le train d’atterrissage sorti, la protection du mode 3 cesse lorsque la vitesse anémométrique de l’hélicoptère baisse sous 50 KIAS. La décision d’utiliser 50 KIAS comme seuil minimal de vitesse anémométrique pour le mode 3 avec le train sorti était considérée comme un compromis acceptable pour éviter les fausses alarmes lors du déplacement de l’hélicoptère dans un environnement d’aéroport ou lors de décollages interrompus. De plus, la décision du fabricant a été influencée par la conviction que s’il se produisait une descente inopinée durant le décollage, elle ne serait pas accompagnée d’une réduction importante de vitesse anémométrique. Cependant, cela crée une lacune dans la protection fournie par l’EGPWS du S-92A.
Si, comme dans l’événement à l’étude, il se produit une descente inopinée avec le train d’atterrissage sorti et une vitesse anémométrique inférieure à 50 KIAS, l’EGPWS n’offrira aucun avertissement contre les impacts sans perte de contrôle (CFIT), peu importe le taux de descente. Aucun seuil de taux de descente n’est établi, pour les besoins de l’EGPWS, pour permettre de faire la différence entre une descente contrôlée et une descente inopinée qui pourrait entraîner un CFIT.
Fait établi quant aux causes et aux facteurs contributifs
L’EGPWS du S-92A ne donne pas d’avertissement d’une descente inopinée à des vitesses anémométriques inférieures à 50 KIAS lorsque le train d’atterrissage est sorti. Par conséquent, l’EGPWS n’a pas alerté l’équipage de conduite du risque imminent de CFIT.
En 2016, le TSB a émis une recommandation prônant l’installation de systèmes d’avertissement et d’alarme d’impact à bord d’hélicoptères commerciaux qui effectuent des vols la nuit ou dans des IMC. Au moment de la rédaction du présent rapport, la réglementation ne contient toujours pas cette exigence, et on ne sait pas si et comment TC agira pour répondre à l’intention de cette recommandation.
Fait établi quant aux risques
Tant que les EGPWS ou les HTAWS ne sont pas obligatoires à bord des hélicoptères commerciaux canadiens qui volent de nuit ou en IMC, l’équipage de conduite et les passagers à bord de ces vols courent un risque accru de CFIT.
2.7 Enregistreur de conversations de poste de pilotage
Dans l’événement à l’étude, le personnel qui a procédé au téléchargement des données du FDR, à la demande du constructeur, n’avait pas une compréhension approfondie du système CVR ni des exigences relatives à la conservation des renseignements contenus dans l’enregistreur stipulées au paragraphe 8(1) du Règlement sur le Bureau de la sécurité des transports. En conséquence, de précieux renseignements ont été perdus, alors qu’ils auraient pu être utiles à l’enquête.
Fait établi quant aux risques
Si les exploitants ne mettent pas en œuvre des mesures adéquates pour préserver les enregistrements audio du CVR et les données du FDR après un événement devant être signalé, il y a un risque que des renseignements potentiellement précieux soient perdus.
3.0 Faits établis
3.1 Faits établis quant aux causes et aux facteurs contributifs
Il s’agit des conditions, actes ou lacunes de sécurité qui ont causé l’événement ou y ont contribué.
- Au moment de l’événement à l’étude, des conditions météorologiques de vol aux instruments étaient présentes. Ces conditions ont engendré un environnement visuel dégradé qui était particulièrement propice à la désorientation spatiale et qui offrait des repères inadéquats pour permettre une approche à vue vers l’installation centrale Thebaud.
- Les pilotes cherchant à s’acquitter de leur tâche dans un délai qu’ils s’étaient eux-mêmes imposé, leur processus décisionnel a été influencé par leur expérience passée et leur confiance réciproque. Par conséquent, les pilotes ont tenté une approche à vue non normalisée dans un environnement visuel dégradé, sans examiner rigoureusement les risques et les autres options.
- Les procédures d’utilisation normalisées de Canadian Helicopters Offshore fournissaient à l’équipage de conduite des indications insuffisantes pour que les approches soient menées conformément aux lignes directrices d’approche stabilisée recommandées dans l’industrie.
- Le fait d’enfoncer et tenir enfoncé le bouton de débrayage du compensateur cyclique en pilotant dans un environnement visuel dégradé a augmenté la charge de travail du pilote et contribué à des difficultés de contrôle ayant engendré une approche instable qui s’est traduite par un anneau tourbillonnaire.
- L’approche de l’hélicoptère est devenue instable en raison d’un profil de vol inopiné à faible énergie et à taux élevé de descente.
- Les pilotes ont subi un rétrécissement de l’attention en raison de l’augmentation de la charge de travail alors qu’ils effectuaient une approche extracôtière à vue non normalisée dans un environnement visuel dégradé. Par conséquent, les pilotes ont négligé la contre-vérification des instruments, ce qui les a empêchés de se rendre compte en temps opportun que l’approche était devenue instable.
- Le système d’avertissement de proximité du sol amélioré du S-92A ne donne pas d’avertissement d’une descente inopinée à des vitesses anémométriques inférieures à 50 nœuds de vitesse indiquée lorsque le train d’atterrissage est sorti. Par conséquent, le système d’avertissement de proximité du sol amélioré n’a pas alerté l’équipage de conduite du risque imminent d’impact sans perte de contrôle.
- Il est probable que le pilote aux commandes a été touché par une incapacité subtile en raison d’une désorientation spatiale découlant de la descente rapide et inattendue de l’hélicoptère dans la couche de brouillard. En conséquence, la mesure de rétablissement a été initialement retardée jusqu’à ce que les pilotes établissent un contact visuel avec l’eau et que le collectif soit augmenté rapidement pour arrêter la descente.
- L’augmentation de puissance alors que l’hélicoptère volait à une vitesse anémométrique faible et suivait un taux de descente élevé selon un angle d’approche prononcé a entraîné de l’hélicoptère dans l’anneau tourbillonnaire. Cette situation a contribué à la descente rapide de l’hélicoptère à travers la couche de brouillard, ce qui a amené l’aéronef à 13 pieds de l’eau.
3.2 Faits établis quant aux risques
Il s’agit des conditions, des actes dangereux, ou des lacunes de sécurité qui n’ont pas été un facteur dans cet événement, mais qui pourraient avoir des conséquences néfastes lors de futurs événements.
- Si les manuels de vol des fabricants et les procédures d’utilisation normalisées des exploitants ne contiennent pas de lignes directrices pour l’utilisation du bouton de débrayage du compensateur cyclique, il pourrait en résulter des problèmes de contrôle de l’aéronef dans un environnement visuel dégradé en raison de l’utilisation sous-optimale des commandes automatiques de vol.
- Si les pilotes d’un aéronef multipilote effectuent en même temps des manipulations de commandes pendant que l’aéronef se trouve dans un état indésirable, il y a un risque que les efforts de rétablissement deviennent plus difficiles et que les marges de sécurité se réduisent.
- Si les pilotes dérogent aux procédures d’utilisation normalisées, cela peut entraîner une augmentation involontaire de la charge de travail des pilotes et réduire les marges de sécurité à des niveaux inacceptables.
- Si les procédures d’utilisation normalisées de la compagnie ne définissent pas clairement et n’établissent pas de procédures de pilotage en environnement visuel dégradé, il y a un risque que les pilotes admettent un niveau de risque inacceptable en tentant de mener des manœuvres à vue dans des conditions météorologiques de vol aux instruments ou dans un environnement visuel dégradé.
- Si les exposés d’approche ne sont pas suffisamment détaillés, il y a un risque que des dangers opérationnels ne soient pas pris en compte avant de tenter une approche.
- Si les procédures d’utilisation normalisées d’une compagnie contiennent des procédures contradictoires ou ambiguës, il y a une probabilité accrue d’erreurs de procédure qui peuvent réduire les marges de sécurité à des niveaux inacceptables.
- Si le programme de suivi des données de vol d’une compagnie ne contrôle pas des paramètres précis établis dans les procédures d’utilisation normalisées, il réduit la capacité de la compagnie à cerner de façon proactive des tendances susceptibles de réduire les marges de sécurité.
- Tant que les systèmes d’alerte de proximité du sol améliorés ou les systèmes d’avertissement et d’alarme d’impact pour hélicoptères ne sont pas obligatoires à bord des hélicoptères commerciaux canadiens qui volent de nuit ou dans des conditions météorologiques de vol aux instruments, l’équipage de conduite et les passagers à bord de ces vols courent un risque accru d’impact sans perte de contrôle.
- Si les exploitants ne mettent pas en œuvre des mesures adéquates pour préserver les enregistrements audio de l’enregistreur de conversations de poste de pilotage et les données de l’enregistreur de données de vol après un événement devant être signalé, il y a un risque que des renseignements potentiellement précieux soient perdus.
4.0 Mesures de sécurité
4.1 Mesures de sécurité prises
4.1.1 Canadian Helicopters Offshore
À la suite de l’événement à l’étude, la compagnie Canadian Helicopters Offshore a pris les mesures de sécurité suivantes :
- Elle a volontairement mis un terme à toutes les opérations aériennes jusqu’à ce qu’une meilleure compréhension de l’événement soit rendue possible.
- Elle a effectué un examen des procédures de préservation des données de l’enregistreur de conversations de poste de pilotage (CVR) et de l’enregistreur de données de vol (FDR).
- Elle a effectué un examen de son plan d’intervention d’urgence.
- Elle a mené une enquête interne, dans le cadre de son système de gestion de la sécurité (SGS), afin de déterminer les circonstances qui ont contribué à l’événement.
- Elle a élaboré une procédure d’approche en environnement visuel dégradé (DVE) à inclure dans ses procédures d’utilisation normalisées (SOP).
- Elle a élaboré une trousse de formation pour le retour au pilotage, comprenant :
- une formation supplémentaire en gestion des ressources de l’équipage (CRM) portant sur les DVE, le gradient du poste de pilotage et la prise de décisions;
- une formation théorique sur simulateur, portant entre autres sur la gestion de la puissance et la nouvelle procédure d’approche en DVE;
- une séance sur simulateur portant sur la nouvelle procédure d’approche en DVE.
- Elle a communiqué de l’information à HeliOffshore pour accroître la sensibilisation et favoriser des activités sécuritaires dans le secteur.
Au dernier trimestre de 2019, CHO avait volontairement demandé que le Ministre suspende son certificat d’exploitant aérien, puisque la compagnie n’avait plus d’aéronef en sa possession ni aucun contrat en cours.
Le présent rapport conclut l’enquête du Bureau de la sécurité des transports du Canada sur cet événement. Le Bureau a autorisé la publication de ce rapport le Le rapport a été officiellement publié le
Annexes
Annexe A – Capture d’écran de l’animation de l’événement (paramètres de vol)
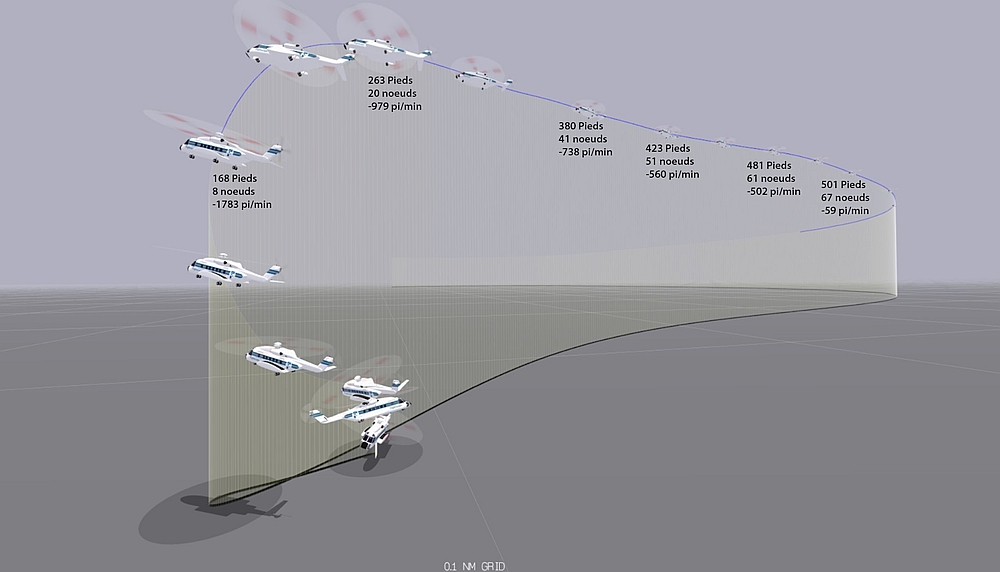
Source : BST
Annexe B – Profil vertical estimé pendant le rétablissement
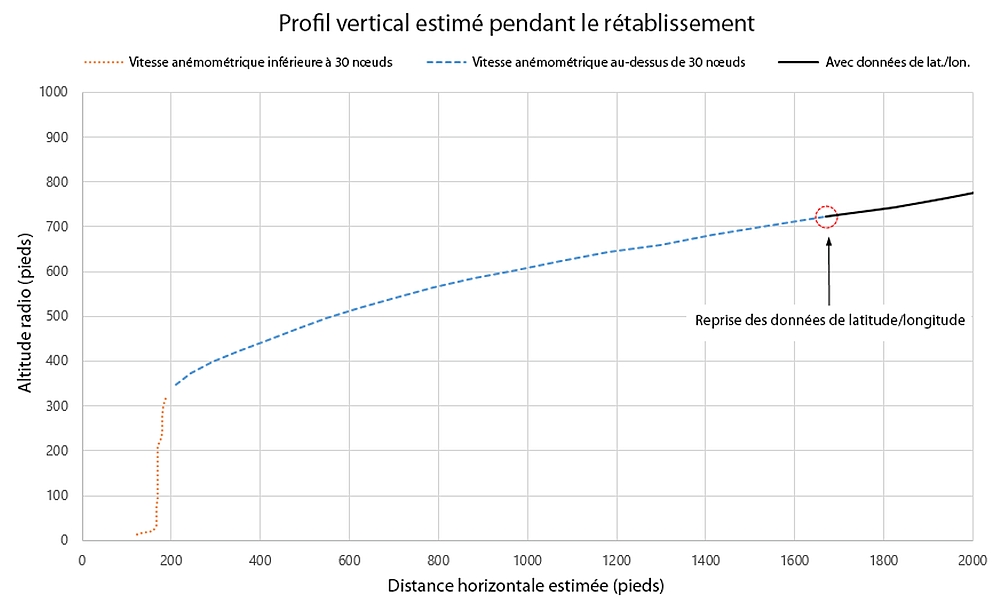
Source : BST
Annexe C – Comparaison du vol à l’étude avec la limite d’alerte du mode 7
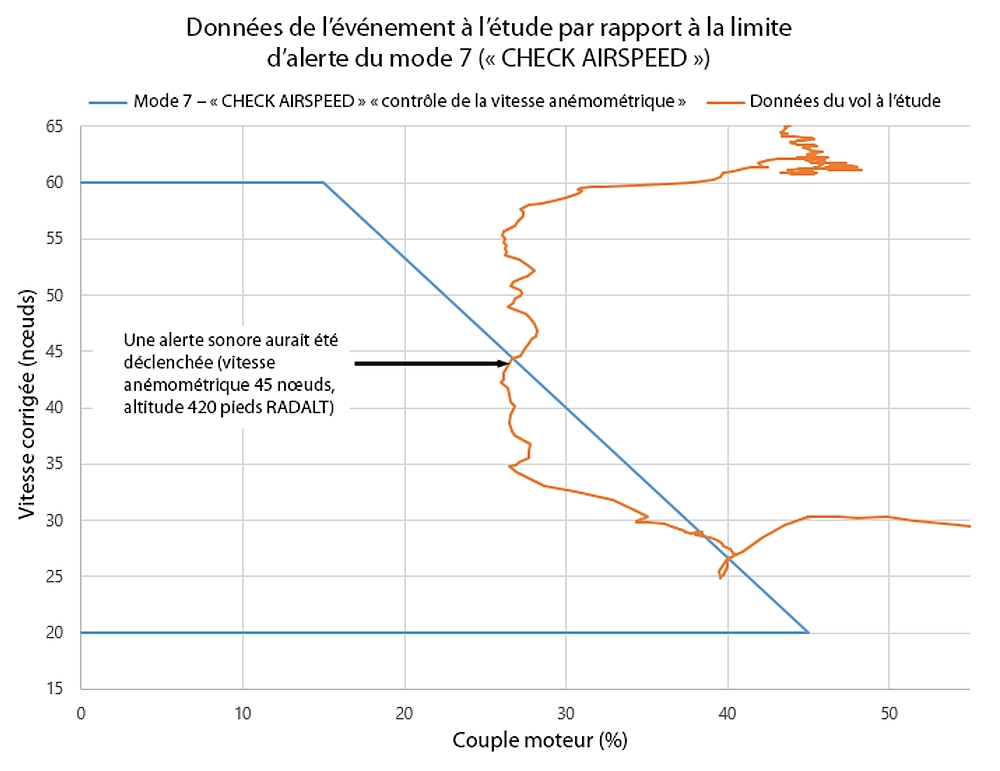
Source : BST
Annexe D – Résumé des événements du BST de 2004 à 2020 dans lesquels les données du l’enregistreur de conversations de poste de pilotage ont été écrasées
Tableau D1. Cas d’écrasement des données d’enregistreur de conversations de poste de pilotage constatés dans des événements du BST (enregistreurs de conversations de poste de pilotage de 30 minutes et de 2 heures), 2004 à 2020
| Année | Événements du BST où il y a eu écrasement des données de CVR de 30 minutes | Nombre | Événements du BST où il y a eu écrasement des données de CVR de 2 heures | Nombre |
|---|---|---|---|---|
2004 |
A04O0237 |
2 |
Aucun |
0 |
2005 |
A05F0047 |
4 |
Aucun |
0 |
2006 |
A06C0204 |
2 |
Aucun |
0 |
2007 |
Aucun |
0 |
A07C0106 |
1 |
2008 |
A08A0147 |
8 |
A08C0164 |
2 |
2009 |
A09O0117 |
1 |
Aucun |
0 |
2010 |
A10A0123 |
2 |
Aucun |
0 |
2011 |
A11Q0042 |
1 |
A11F0012 |
4 |
2012 |
A12A0009 |
2 |
A12O0074 |
2 |
2013 |
Aucun |
0 |
A13O0045 |
1 |
2014 |
A14A0052 |
1 |
A14H0001 |
4 |
2015 |
A15O0015 |
4 |
A15F0165 |
2 |
2016 |
Aucun |
0 |
A16O0021 |
4 |
2017 |
Aucun |
0 |
A17O0184 |
3 |
2018 |
A18A0088 |
1 |
A18P0119 |
2 |
2019 |
A19F0184 |
2 |
A19A0055 |
3 |
2020 |
Aucun |
0 |
A20A0001 |
1 |
|
Total |
30 |
|
29 |
Source : BST
| Poursuite du vol | Mise sous tension après l’arrêt | |
|---|---|---|
CVR de 30 minutes |
14 |
16 |
CVR de 2 heures |
11 |
18 |
Pourcentage de tous les cas d’écrasement des données |
42 % |
58 % |
Source : BST
Annexe E – Tableau des performances de croisière du S-92A (conditions de l’événement à l’étude)
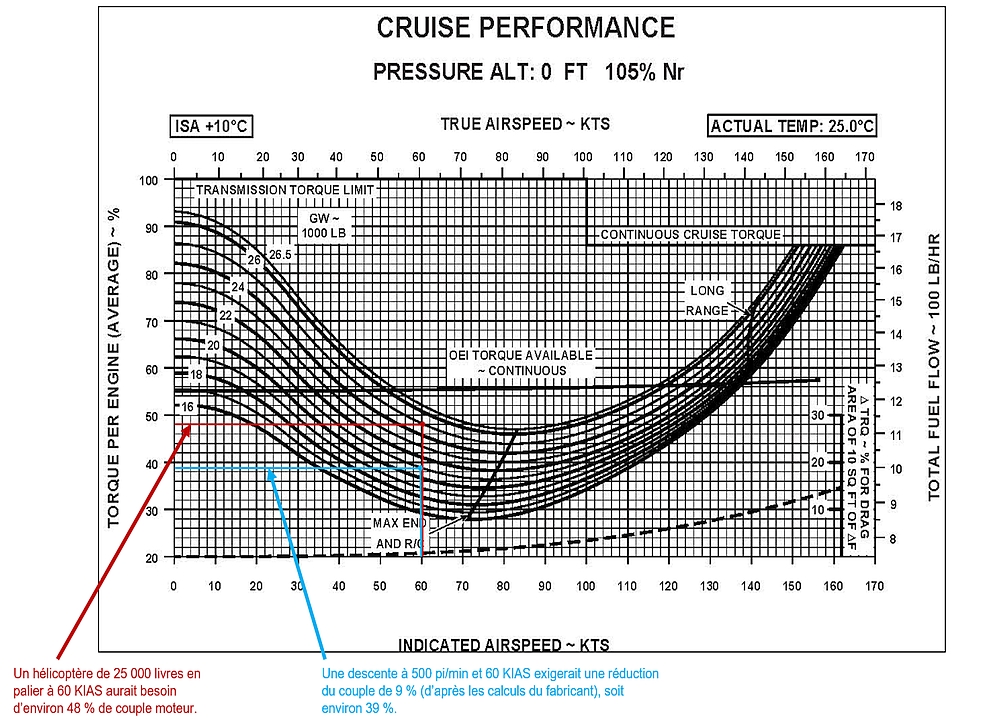
Source : Sikorsky, FAA Approved Rotorcraft Flight Manual: Sikorsky Model S-92A, SA S92A-RFM-003, révision 8 (2 mai 2012), partie 2, section III : Supplemental Performance Data, figure 3-13, p. III-1-18, avec annotations du BST
Annexe F – Représentation d’un environnement visuel dégradé pendant l’approche finale
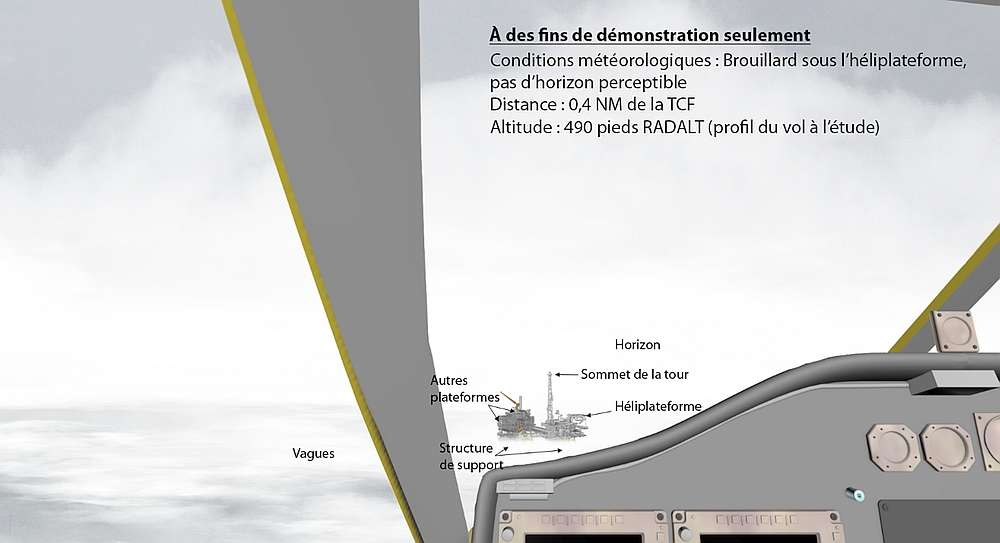
Source : BST
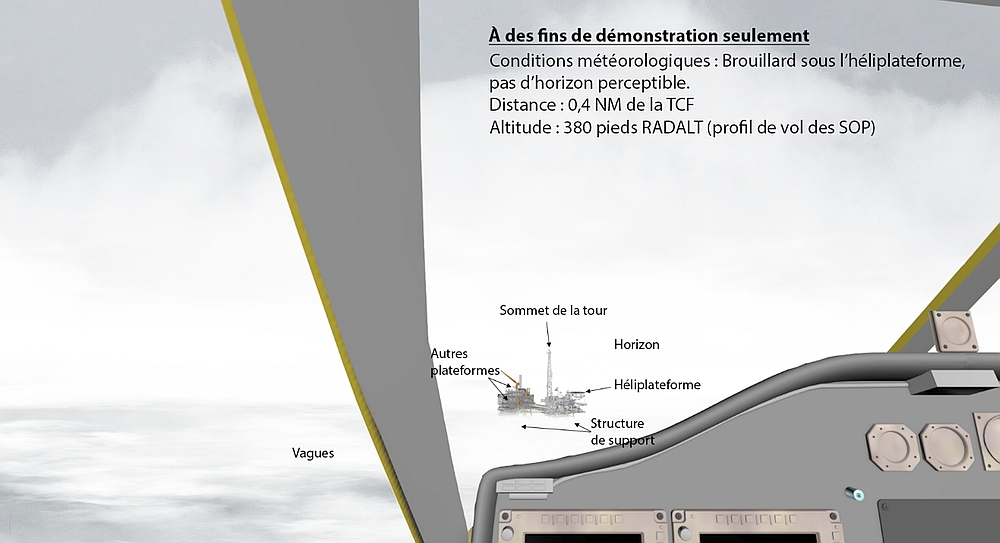
Source : BST
Annexe G – Représentation de conditions météorologiques dégagées pendant l’approche finale
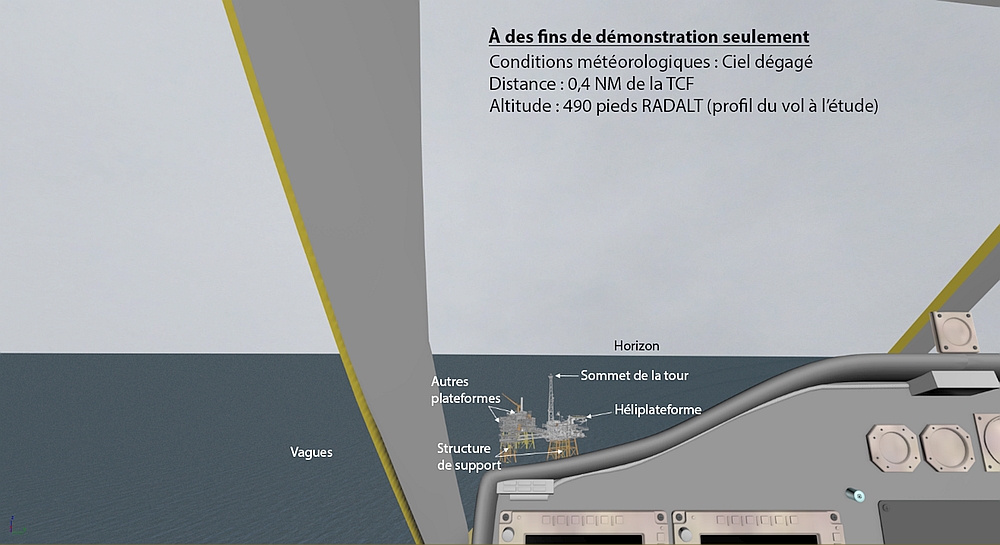
Source : BST
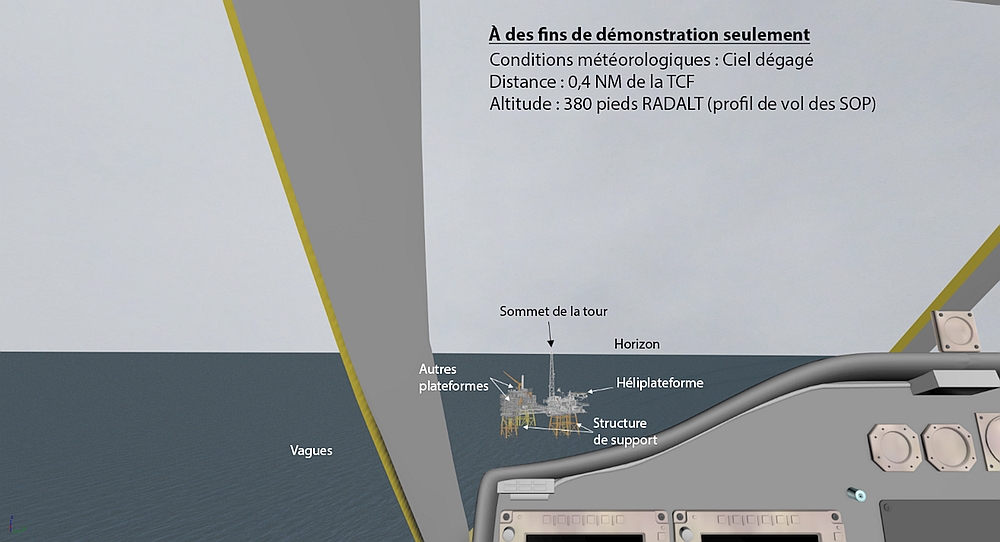
Source : BST
GLOSSAIRE
- AAIB
- Air Accidents Investigation Branch (Royaume-Uni)
- AFCS
- système de commandes automatiques de vol
- AGL
- au-dessus du sol
- AHRS
- système de référence de cap et d’attitude
- AMS
- système de gestion avionique
- APU
- groupe auxiliaire de bord
- ARA
- approche radar de bord
- ARC
- Aviation royale canadienne
- ASL
- au-dessus du niveau de la mer
- ATT
- mode de maintien de l’assiette
- AVC
- contrôle actif des vibrations
- BST
- Bureau de la sécurité des transports du Canada
- CA
- courant alternatif
- CC
- courant continu
- CFD
- directeur de vol couplé
- CFIT
- impact sans perte de contrôle
- CHO
- Canadian Helicopters Offshore
- COM
- manuel d’exploitation de la compagnie
- CVR
- enregistreur de conversations de poste de pilotage
- CYHZ
- Aéroport international Stanfield d’Halifax (Nouvelle-Écosse)
- DVE
- environnement visuel dégradé
- EFVS
- systèmes de vision de vol améliorée
- EGPWS
- système d’avertissement de proximité du sol amélioré
- EICAS
- système d’affichage des paramètres moteurs et d’alerte de l’équipage
- FAF
- repère d’approche finale
- FDR
- enregistreur de données de vol
- FMS
- système de gestion de vol
- HCL
- Hélicoptères Canadiens Limitée
- HFDM
- suivi des données de vol des hélicoptères
- HTAWS
- système d’avertissement et d’alarme d’impact pour hélicoptère
- HUMS
- système de surveillance des cycles de fonctionnement
- IFR
- règles de vol aux instruments
- IMC
- conditions météorologiques de vol aux instruments
- inHg
- pouces de mercure
- KIAS
- vitesse anémométrique indiquée, en nœuds
- M
- magnétique
- MFD
- écran multifonction de vol
- MPFR
- enregistreur de vol multifonction
- NM
- mille marin
- Nr
- régime du rotor principal
- OFP
- plan de vol exploitation
- PF
- pilote aux commandes
- PFD
- écran principal de vol
- pi/min
- pieds par minute
- PM
- pilote surveillant
- RAC
- Règlement de l’aviation canadien
- RADALT
- altitude radar
- RFM
- manuel de vol du giravion
- SAR
- recherche et sauvetage
- SAS
- système d’augmentation de stabilité
- SM
- mille terrestre
- SOP
- procédures d’utilisation normalisées
- TC
- Transports Canada
- TCF
- plateforme Thebaud
- V
- vrai
- VFR
- règles de vol à vue
- VMC
- conditions météorologiques de vol à vue
- VMINI
- vitesse minimale de vol aux instruments
- VRS
- anneau tourbillonnaire